
目录
1.制作智能小车的硬件名单:
| STM32C6T6核心板 | 1块 |
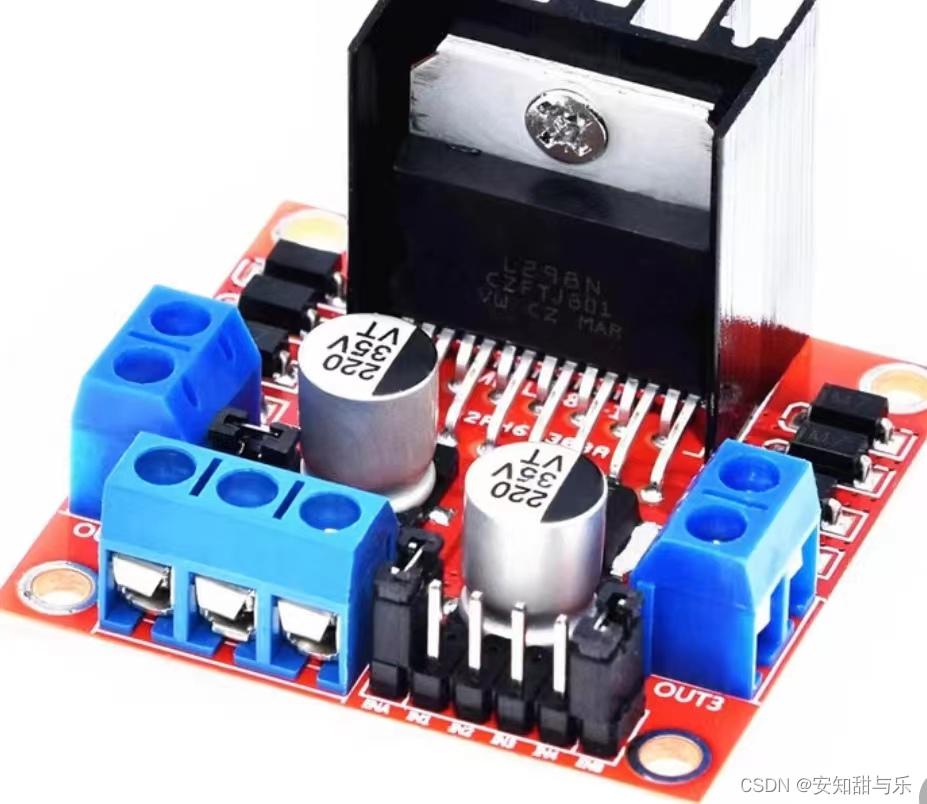
| L298N电机驱动 | 1块 |
| 五路灰度循迹模块 | 1个 |
| 带电机轮子的小车底盘(自带tt电机) | 1个 |
| 12V供电电池 | 1个 |
| 蓝牙模块 | 1个 |
| 超声波 | 1个 |
| 电源转换模块 | 1个 |
| OLED屏幕 | 1个 |
| LED灯 | 1个 |
| 蜂鸣器 | 1个 |
1.小车底盘可以凭自己爱好买两轮或者四轮的。
2.核心板也可以凭性能改变,我觉得c6t6的已经可以完成他们了。
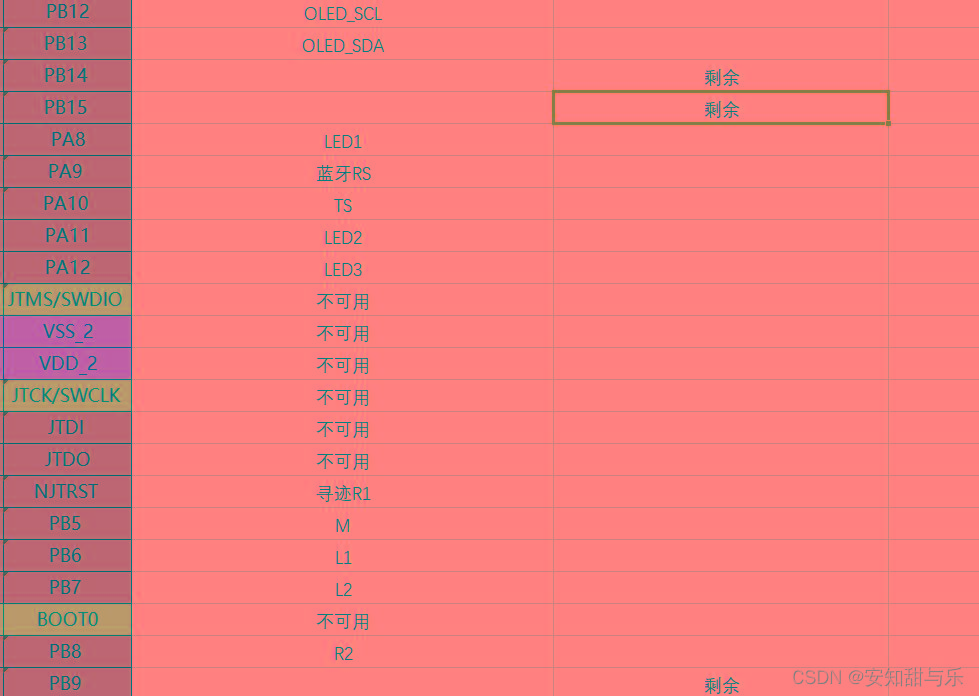
3.引脚图
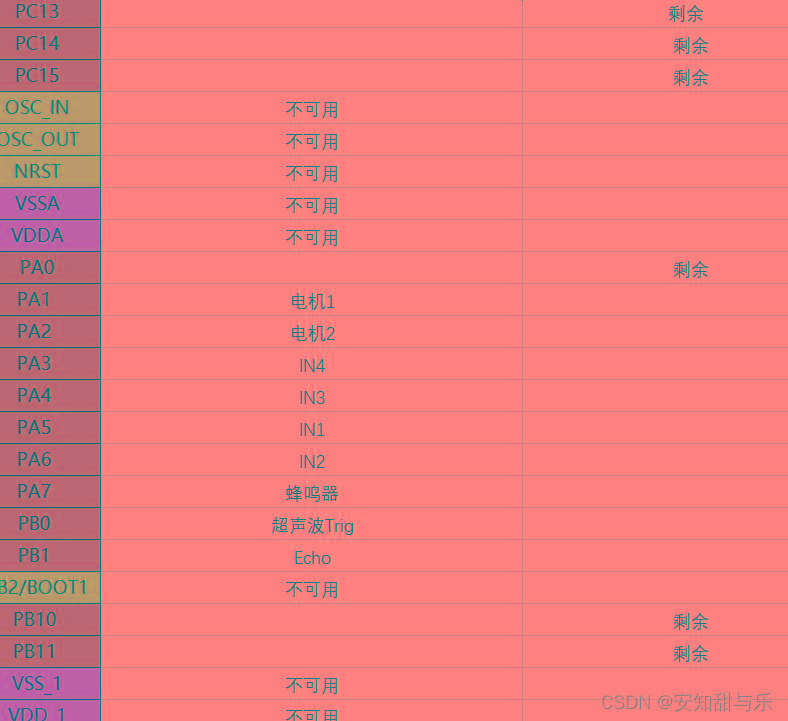
2.先让小车动起来

1.小车运动
前进:让所有的轮子正转。
后退:让所有的轮子反转。
左转:左侧轮子不动,右边轮子往正转。
右转:右侧轮子不动,左边轮子往反转。
2.代码
#include "motor.h"
//使用定时器2
void PWM_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 36 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0; //CCR
TIM_OC3Init(TIM2, &TIM_OCInitStructure);
TIM_OC2Init(TIM2, &TIM_OCInitStructure);
TIM_Cmd(TIM2, ENABLE);
}
void PWM_SetCompare3(uint16_t Compare)
{
TIM_SetCompare3(TIM2, Compare);
}
void PWM_SetCompare2(uint16_t Compare)
{
TIM_SetCompare2(TIM2, Compare);
}
void Motor_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5 |GPIO_Pin_3 | GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
PWM_Init();
}
//TIM_SetCompare2 TIM_SetCompare3的数值分别对应左右两边的速度,可自行调整
void run(u8 s)
{
TIM_SetCompare2(TIM2,s);
TIM_SetCompare3(TIM2,s);
IN1 = 1;
IN2 = 0;
IN3 = 1;
IN4 = 0;
}
void back(u8 s)
{
TIM_SetCompare2(TIM2,s);
TIM_SetCompare3(TIM2,s);
IN1 = 0;
IN2 = 1;
IN3 = 0;
IN4 = 1;
}
void zhuan1(u8 s)
{
TIM_SetCompare2(TIM2,s);
TIM_SetCompare3(TIM2,s);
IN1 = 1;
IN2 = 0;
IN3 = 0;
IN4 = 1;
}
void zhuan2(u8 s)
{
TIM_SetCompare2(TIM2,s);
TIM_SetCompare3(TIM2,s);
IN1 = 0;
IN2 = 1;
IN3 = 1;
IN4 = 0;
}
void right(u8 s)
{
TIM_SetCompare2(TIM2,s);
TIM_SetCompare3(TIM2,s);
IN1 = 1;
IN2 = 1;
IN3 = 1;
IN4 = 0;
}
void left(u8 s)
{
TIM_SetCompare2(TIM2,s);
TIM_SetCompare3(TIM2,s);
IN1 = 1;
IN2 = 0;
IN3 = 1;
IN4 = 1;
}
void stop()
{
IN1 = 0;
IN2 = 0;
IN3 = 0;
IN4 = 0;
}#ifndef __MOTOR_H
#define __MOTOR_H
#include "bm.h"
#include "stm32f10x.h" // Device header
//可以按照此处接线 IN1~4
#define IN1 PAout(6)
#define IN2 PAout(5)
#define IN3 PAout(4)
#define IN4 PAout(3)
void Motor_Init(void);
void run(u8 s);
void left(u8 s);
void right(u8 s);
void back(u8 s);
void stop(void);
void zhuan1(u8 s);
void zhuan2(u8 s);
#endif3.寻迹
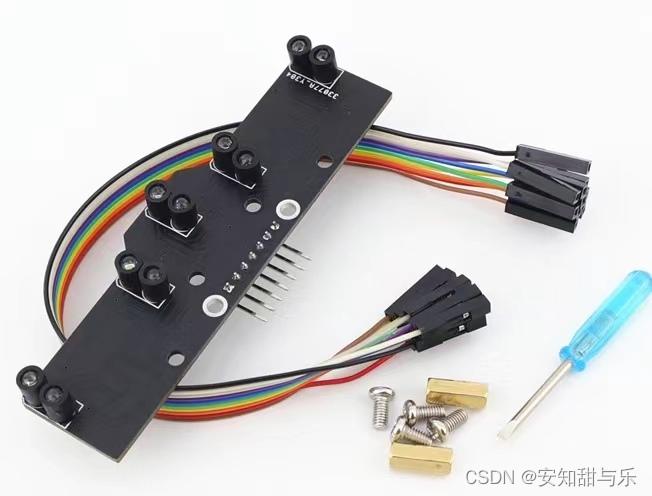
1.工作原理
黑色返回1,对应的灯不亮。
白色返回0,对应的灯亮。
可以用螺丝刀调节灵敏度。
2.代码
#include "xunji.h"
#include "motor.h"
#include "Delay.h"
//五路寻迹模块
void XUN_GPIO_COnfine(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_4|GPIO_Pin_8|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
extern int l;
//寻迹运动
//根据线的宽度来决定;
void run1(void )
{
if(L2==0&&L1==0&&M==1&&R1==0&&R2==0&&l>20)
{run(70);}
else if(L2==0&&L1==1&&M==0&&R1==0&&R2==0&&l>20)
{ run(70);}
else if(L2==0&&L1==0&&M==0&&R1==1&&R2==0&&l>20)
{ run(70);}
else if(L2==0&&L1==0&&M==1&&R1==1&&R2==0&&l>20)
{ run(70);}
else if(L2==0&&L1==1&&M==1&&R1==0&&R2==0&&l>20)
{ run(70);}
else if(L2==0&&L1==1&&M==1&&R1==1&&R2==0&&l>20)
{ run(70);}
else if(L2==0&&L1==1&&M==1&&R1==1&&R2==1&&l>20)
{ left(70);}
else if(L2==1&&L1==1&&M==1&&R1==1&&R2==0&&l>20)
{ right(70);}
else if(L2==1&&L1==0&&M==0&&R1==0&&R2==0&&l>20)
{right(80);}
else if(L2==1&&L1==1&&M==0&&R1==0&&R2==0&&l>20)
{right(80);}
else if(L2==1&&L1==1&&M==1&&R1==0&&R2==0&&l>20)
{right(80);}
else if(L2==1&&L1==0&&M==1&&R1==0&&R2==0&&l>20)
{right(80);}
else if(L2==1&&R2==0&&l<20)
{right(80);}
else if(L2==0&&L1==0&&M==1&&R1==1&&R2==1&&l>20)
{left(80);}
else if(L2==0&&L1==0&&M==0&&R1==1&&R2==1&&l>20)
{left(80);}
else if(L2==0&&L1==0&&M==0&&R1==0&&R2==1&&l>20)
{left(80);}
else if(L2==0&&L1==0&&M==1&&R1==0&&R2==1&&l>20)
{left(80);}
else if(L2==0&&R2==1&&l>20)
{left(80);}
else if(L2==1&&L1==1&&M==1&&R1==1&&R2==1&&l>20)
{ zhuan1(75);
Delay_ms(100);
stop();
Delay_ms(500);
}
else if(L2==0&&L1==0&&M==0&&R1==0&&R2==0&&l>20)
{
zhuan1(75);
Delay_ms(100);
stop();
Delay_ms(500);
}
}#ifndef __XUNJI_H
#define __XUNJI_H
#include "stm32f10x.h" // Device header
#define R2 GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_8)
#define R1 GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_4)
#define M GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_5)
#define L1 GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_6)
#define L2 GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_7)
void XUN_GPIO_COnfine(void);
void run1(void);
#endif4.超声波避障

1.工作原理
由于超声波碰到物体返回的特点,利用两者的时间差,以及声音在空中的速度就可以计算出障碍物的距离,进行躲避。
2.代码
#include "sonic.h"
//定时器3设置
void hcsr04_NVIC()
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
//IO口初始化 及其他初始化
void Hcsr04Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin =Trig_Pin;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_ResetBits(GPIOB ,Trig_Pin);
GPIO_InitStructure.GPIO_Pin = Echo_Pin ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_ResetBits(GPIOB,Echo_Pin);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
TIM_DeInit(TIM3);
TIM_TimeBaseStructure.TIM_Period = (1000-1);
TIM_TimeBaseStructure.TIM_Prescaler =(72-1);
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_ClearFlag(TIM3, TIM_FLAG_Update);
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE);
hcsr04_NVIC();
TIM_Cmd(TIM3,DISABLE);
}
u16 msHcCount = 0;
//打开定时器3
static void OpenTimerForHc()
{
TIM_SetCounter(TIM3,0);
msHcCount = 0;
TIM_Cmd(TIM3, ENABLE);
}
//关闭定时器3
static void CloseTimerForHc()
{
TIM_Cmd(TIM3, DISABLE);
}
//定时器3终中断
void TIM3_IRQHandler(void)
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update );
msHcCount++; //计数器开始加
}
}
//获取定时器3计数器值
u32 GetEchoTimer(void)
{
u32 t = 0;
t = msHcCount*1000;
t += TIM_GetCounter(TIM3);
TIM3->CNT = 0; //计数器归零
Delay_ms(50);
return t;
}
//通过定时器3计数器值推算距离
float Hcsr04GetLength(void )
{
u32 t = 0;
int i = 0;
float lengthTemp = 0;
float sum = 0;
u8 ll=0;
while(i!=5) //测量五次取平均
{
for(ll=0;ll<5;ll++)
{
TRIG_Send = 1; //给控制端高电平
Delay_us(20);
TRIG_Send = 0; //超声波模块已开始发送8个40khz脉冲
}
while(ECHO_Reci == 0); //若ECHO_Reci为低电平,则一直循环,直到为高电平。
OpenTimerForHc(); //此时说明检测到高电平,开启定时器,开始计时。
i = i + 1;
while(ECHO_Reci == 1); //若ECHO_Reci为高电平,则一直循环,直到为低电平。
CloseTimerForHc(); //此时说明检测到低电平,关闭定时器,停止计时
t = GetEchoTimer(); //获取定时器时间
lengthTemp = ((float)t/58.0); //数据处理,转换成cm
sum = lengthTemp + sum ; //五次测得数据累加
}
lengthTemp = sum/5.0; //取平均
return lengthTemp;
}
//超声波避障
extern int l;
void run2()
{
if(l>30)
{
run(70);
}
if(l<=30)
{
back(70);
}
if(l<=7)
{
zhuan1(75);
Delay_ms(100);
stop();
Delay_ms(500);
}
}
#ifndef __SONIC_H
#define __SONIC_H
#include "stm32f10x.h" // Device header
#include "BM.h"
#include "Delay.h"
#include "motor.h"
#define Trig_Pin GPIO_Pin_0
#define TRIG_Send PBout(0)
#define Echo_Pin GPIO_Pin_1
#define ECHO_Reci PBin(1)
void Hcsr04Init(void);
float Hcsr04GetLength(void);
void run2(void);
#endif
5.蓝牙遥控

1.蓝牙工作原理
购买回来的蓝牙模块需要进行设置时(如主从机设置、波特率、蓝牙名称以及密码修改等):
进入AT指令方法,具体要看手册,不同模块有不同进入方法,
打开串口,设置与蓝牙模块相同波特率:
3、主、从机模式设置:
主、从机模式需要通过设置实现(蓝牙模块都默认为从机模式,不需要改请忽略),既通过串口发送AT指令设置:
AT+ROLE设置主从模式: AT+ROLE?是查询主从状态;AT+ROLE=1是设成主;AT+ROLE=0是设成从。
4、波特率设置:
波特率一般默认为9600。波特率越低,传输速度越慢,但也不是越高越好,看具体情况而定,一般单片机用的都是9600。(注意:蓝牙模块的波特率需要和单片机的相同,否则传输不了数据)
这个默认波特率不是每个蓝牙模块都一样的,有的蓝牙模块默认波特率是115200,使用的时候需要看下商家资料。或者每个波特率试着改一下,总能试出来蓝牙模块的默认波特率。
指令代码部分先还有很多(比如:改蓝牙名称、蓝牙密码),感兴趣的话可以看一下数据手册,这里就不说那么多。
2.代码
include "hc_05.h"
//蓝牙
void uart1_init( u32 bound )
{
/* GPIO端口设置 */
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd( HC_05_GPIO_CLK, ENABLE );
RCC_APB2PeriphClockCmd( HC_05_CLK , ENABLE ); /* 使能USART1,GPIOA时钟 */
/* TXD */
GPIO_InitStructure.GPIO_Pin = TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init( HC_05_GPIO_PORT, &GPIO_InitStructure );
/* RXD */
GPIO_InitStructure.GPIO_Pin = RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init( HC_05_GPIO_PORT, &GPIO_InitStructure );
/* USART 初始化设置 */
USART_InitStructure.USART_BaudRate = bound; /* 串口波特率 */
USART_InitStructure.USART_WordLength = USART_WordLength_8b; /* 字长为8位数据格式 */
USART_InitStructure.USART_StopBits = USART_StopBits_1; /* 一个停止位 */
USART_InitStructure.USART_Parity = USART_Parity_No; /* 无奇偶校验位 */
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; /* 无硬件数据流控制 */
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; /* 收发模式 */
USART_Init(HC_05_USARTX, &USART_InitStructure ); /* 初始化串口1 */
USART_Cmd( HC_05_USARTX, ENABLE ); /* 使能串口 1 */
}
/***************** 发送一个字符 **********************/
static void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t ch )
{
/* 发送一个字节数据到USART1 */
USART_SendData(pUSARTx,ch);
/* 等待发送完毕 */
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}
/***************** 发送字符串 **********************/
void Usart_SendString( USART_TypeDef * pUSARTx, uint8_t *str)
{
unsigned int k=0;
do
{
Usart_SendByte( pUSARTx, *(str + k) );
k++;
} while(*(str + k)!='\0');
}#ifndef __HC_05_H
#define __HC_05_H
#include "stm32f10x.h" // Device header
void uart1_init( u32 bound );
void Usart_SendString( USART_TypeDef * pUSARTx, uint8_t *str);
//使用宏定义容易修改串口
#define HC_05_GPIO_PORT GPIOA /* GPIO端口 */
#define HC_05_GPIO_CLK RCC_APB2Periph_GPIOA /* GPIO端口时钟 */
#define RX_GPIO_PIN GPIO_Pin_10
#define TX_GPIO_PIN GPIO_Pin_9
#define HC_05_USARTX USART1
#define HC_05_CLK RCC_APB2Periph_USART1
#endif6.oled屏幕
1.工作内容
显示距离和五路寻迹状况,还有处于那种模式。
7.led灯
#include "led.h"
/**
* @brief 初始化控制LED的IO
* @param 无
* @retval 无
*/
void LED_GPIO_Config(void)
{
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStructure;
/*开启LED相关的GPIO外设时钟*/
RCC_APB2PeriphClockCmd( LED1_GPIO_CLK | LED2_GPIO_CLK|LED3_GPIO_CLK , ENABLE);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = LED1_GPIO_PIN;
/*设置引脚模式为通用推挽输出*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
/*设置引脚速率为50MHz */
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
/*调用库函数,初始化GPIO*/
GPIO_Init(LED1_GPIO_PORT, &GPIO_InitStructure);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = LED2_GPIO_PIN;
/*调用库函数,初始化GPIO*/
GPIO_Init(LED2_GPIO_PORT, &GPIO_InitStructure);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = LED3_GPIO_PIN;
/*调用库函数,初始化GPIO*/
GPIO_Init(LED3_GPIO_PORT, &GPIO_InitStructure);
}
/*********************************************END OF FILE**********************/ifndef __LED_H
#define __LED_H
#include "stm32f10x.h"
/* 定义LED连接的GPIO端口, 用户只需要修改下面的代码即可改变控制的LED引脚 */
#define LED1_GPIO_PORT GPIOA /* GPIO端口 */
#define LED1_GPIO_CLK RCC_APB2Periph_GPIOA /* GPIO端口时钟 */
#define LED1_GPIO_PIN GPIO_Pin_8
#define LED2_GPIO_PORT GPIOA /* GPIO端口 */
#define LED2_GPIO_CLK RCC_APB2Periph_GPIOA /* GPIO端口时钟 */
#define LED2_GPIO_PIN GPIO_Pin_11
#define LED3_GPIO_PORT GPIOA /* GPIO端口 */
#define LED3_GPIO_CLK RCC_APB2Periph_GPIOA /* GPIO端口时钟 */
#define LED3_GPIO_PIN GPIO_Pin_12
/** the macro definition to trigger the led on or off
* 1 - off
*0 - on
*/
#define ON 0
#define OFF 1
/* 使用标准的固件库控制IO*/
#define LED1(a) if (a) \
GPIO_ResetBits(LED1_GPIO_PORT,LED1_GPIO_PIN);\
else \
GPIO_SetBits(LED1_GPIO_PORT,LED1_GPIO_PIN)
#define LED2(a) if (a) \
GPIO_ResetBits(LED2_GPIO_PORT,LED2_GPIO_PIN);\
else \
GPIO_SetBits(LED2_GPIO_PORT,LED2_GPIO_PIN)
#define LED3(a) if (a) \
GPIO_ResetBits(LED3_GPIO_PORT,LED3_GPIO_PIN);\
else \
GPIO_SetBits(LED3_GPIO_PORT,LED3_GPIO_PIN)
/* 直接操作寄存器的方法控制IO */
#define digitalHi(p,i) {p->BSRR=i;} //输出为高电平
#define digitalLo(p,i) {p->BRR=i;} //输出低电平
#define digitalToggle(p,i) {p->ODR ^=i;} //输出反转状态
/* 定义控制IO的宏 */
#define LED1_TOGGLE digitalToggle(LED1_GPIO_PORT,LED1_GPIO_PIN)
#define LED1_OFF digitalHi(LED1_GPIO_PORT,LED1_GPIO_PIN)
#define LED1_ON digitalLo(LED1_GPIO_PORT,LED1_GPIO_PIN)
#define LED2_TOGGLE digitalToggle(LED2_GPIO_PORT,LED2_GPIO_PIN)
#define LED2_OFF digitalHi(LED2_GPIO_PORT,LED2_GPIO_PIN)
#define LED2_ON digitalLo(LED2_GPIO_PORT,LED2_GPIO_PIN)
#define LED3_TOGGLE digitalToggle(LED3_GPIO_PORT,LED3_GPIO_PIN)
#define LED3_OFF digitalHi(LED3_GPIO_PORT,LED3_GPIO_PIN)
#define LED3_ON digitalLo(LED3_GPIO_PORT,LED3_GPIO_PIN)
void LED_GPIO_Config(void);
#endif /* __LED_H */8.蜂鸣器
#include "Buzzer.h"
void Buzzer_GPIO_Config(void)
{
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStructure;
/*开启LED相关的GPIO外设时钟*/
RCC_APB2PeriphClockCmd( Buzzer_GPIO_CLK , ENABLE);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = Buzzer_GPIO_PIN;
/*设置引脚模式为通用推挽输出*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
/*设置引脚速率为50MHz */
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
/*调用库函数,初始化GPIO*/
GPIO_Init(Buzzer_GPIO_PORT, &GPIO_InitStructure);
//置高电平
GPIO_SetBits(Buzzer_GPIO_PORT, Buzzer_GPIO_PIN);
}
#ifndef __Buzzer_H
#define __Buzzer_H
#include "stm32f10x.h" // Device header
#define Buzzer_GPIO_PORT GPIOA /* GPIO端口 */
#define Buzzer_GPIO_CLK RCC_APB2Periph_GPIOA /* GPIO端口时钟 */
#define Buzzer_GPIO_PIN GPIO_Pin_7
#define Buzzer_OFF GPIO_ResetBits(Buzzer_GPIO_PORT,Buzzer_GPIO_PIN)
#define Buzzer_ON GPIO_SetBits(Buzzer_GPIO_PORT,Buzzer_GPIO_PIN)
void Buzzer_GPIO_Config(void);
#endif9.蓝牙使用代码main
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "sonic.h"
#include "xunji.h"
#include "motor.h"
#include <string.h>
#include <stdio.h>
#include <stdlib.h>
#include "led.h"
#include "hc_05.h"
#include "Buzzer.h"
u8 i=0;
int sp,l;
unsigned int receive_data;
void hc_05_send(void)
{
if(receive_data =='a')
{
i=1;
receive_data=0;
}
if(receive_data =='b')
{
i=2;
receive_data=0;
}
if(receive_data =='c')
{
i=3;
receive_data=0;
}
if(receive_data =='d')
{
i=4;
receive_data=0;
}
if(receive_data =='e')
{
i=5;
receive_data=0;
}
if(receive_data =='f')
{
i=6;
receive_data=0;
}
if(receive_data =='g')
{
i=7;
receive_data=0;
}
if(receive_data =='k')
{
i=8;
receive_data=0;
}
if(receive_data =='j')
{
i=9;
receive_data=0;
}
if(receive_data =='l')
{
i=10;
receive_data=0;
}
if(receive_data =='p')
{
i=11;
receive_data=0;
}
if(receive_data =='v')
{
i=12;
receive_data=0;
}
}
void fying(void)
{
if(i==1)
{
OLED_ShowString(1,4," run");
run(90);
}
if(i==2)
{
OLED_ShowString(1,4,"black");
back(90);
}
if(i==3)
{
OLED_ShowString(1,4,"left ");
left(70);
}
if(i==4)
{
OLED_ShowString(1,4,"right ");
right(70);
}
if(i==5)
{
OLED_ShowString(1,4,"zhuan1");
zhuan1(80);
}
if(i==6)
{
OLED_ShowString(1,4," stop ");
stop();
}
if(i==7)
{
run1();
OLED_ShowString(1,4," xunji");
}
if(i==8)
{
OLED_ShowString(1,4," LEDS ");
LED1_OFF;LED2_OFF;LED3_OFF;
}
if(i==9)
{
OLED_ShowString(1,4," LEDM ");
LED1_ON;LED2_ON;LED3_ON;
}
if(i==10)
{
OLED_ShowString(1,4," SONIC ");
run2();
}
if(i==11)
{
OLED_ShowString(1,4,"BUZZER");
Buzzer_OFF;
}
if(i==12)
{
OLED_ShowString(1,4,"BUZZER");
Buzzer_ON;
}
}
int main(void)
{
uart1_init(9600);
OLED_Init();
Motor_Init();
Hcsr04Init();
XUN_GPIO_COnfine();
LED_GPIO_Config();
Buzzer_GPIO_Config();
while(1)
{
sp= (L2* 10000) + (L1 * 1000)+ (M * 100) + (R1 * 10) + R2;
l=Hcsr04GetLength();
OLED_ShowNum(2,4,l,3);
OLED_ShowNum(3,4,sp,5);
if(USART_GetFlagStatus(HC_05_USARTX,USART_FLAG_RXNE)==1)
{
receive_data=USART_ReceiveData(HC_05_USARTX);
hc_05_send();
USART_ClearFlag(HC_05_USARTX,USART_FLAG_RXNE);
}
fying();
if(l<10)
{
Buzzer_OFF;
LED1_OFF;
}
if(l>10)
{
Buzzer_ON;
LED1_ON;
}
}
}
———————–欢迎大家指正交流,有空可以一起讨论代码啊。——————————–
完整工程链接:通过百度网盘分享的文件:小车.zip
链接:https://pan.baidu.com/s/1dXtAi0C-9MGuAeWu13SXeQ?pwd=3gv8
提取码:3gv8
转自:https://blog.csdn.net/ssjsjss/article/details/130108790