
前言
本项目可实现小车红外循迹,L298N电机驱动,红外避障,超声波避障,蓝牙控制等功能的切换。
一、功能
红外循迹,L298N电机驱动,PWM电机调速,红外避障,超声波避障,蓝牙控制,
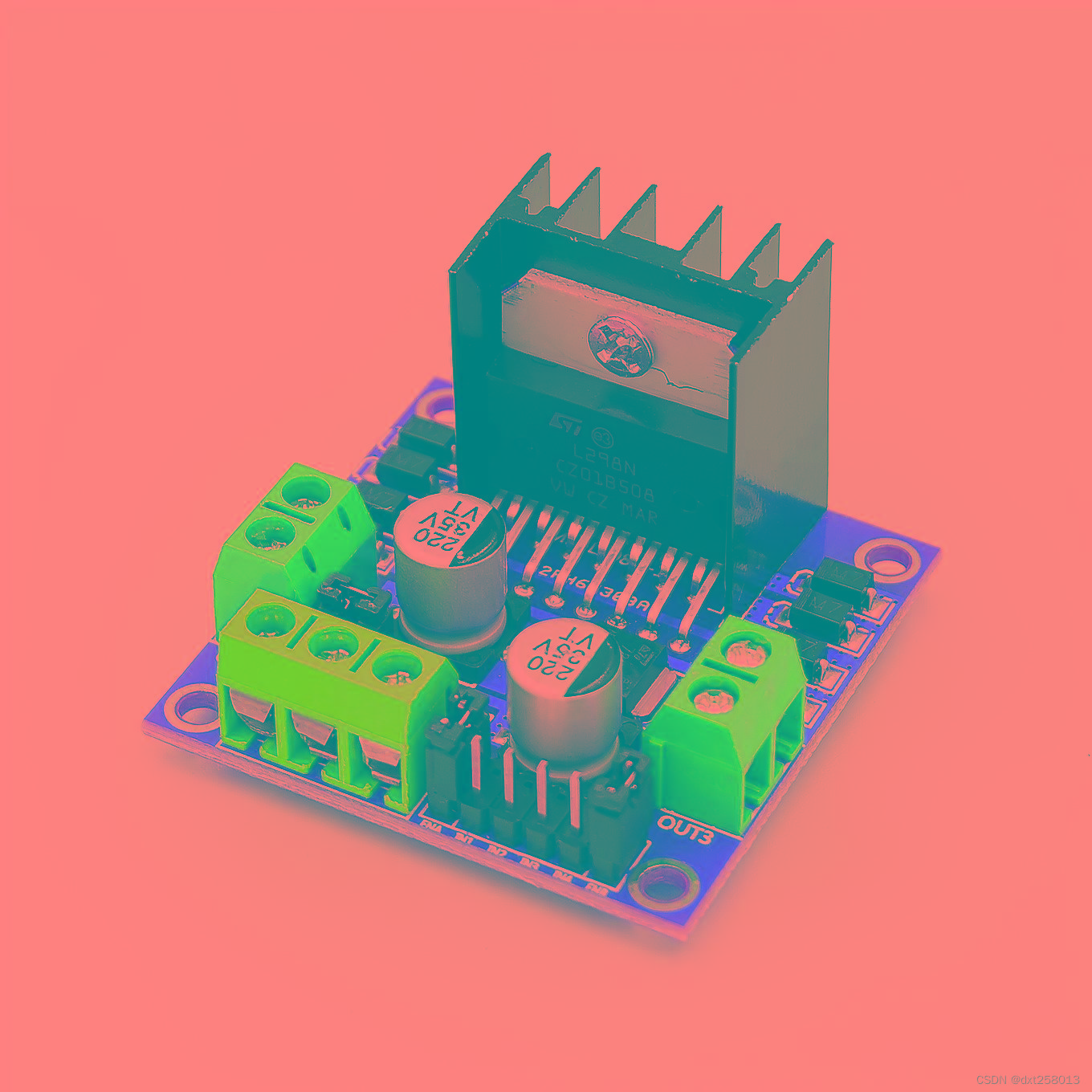
二、模块简介
L298N是比较常用的直流电机驱动板,OUT1~4接入四个电机博主使用的是将两个电机并联的方法,
左右两个电机进行并联),IN1~4接入单片机的I/O口,在IN1~4的两侧有使能ENA、ENB接口,用于PWM变速。
代码:
#include <REGX52.H>
sbit M1A=P0^6; //定义左侧电机驱动A端
sbit M1B=P0^5; //定义左侧电机驱动B端
sbit M2A=P0^4; //定义右侧电机驱动A端
sbit M2B=P0^3; //定义右侧电机驱动B端
sbit M3A=P3^6; //定义后左侧电机驱动A端
sbit M3B=P3^5; //定义后左侧电机驱动B端
sbit M4A=P3^4; //定义后右侧电机驱动A端
sbit M4B=P3^3; //定义后右侧电机驱动B端
sbit EN1A = P0^7;
sbit EN1B = P0^2;
sbit EN2A = P3^7;
sbit EN2B = P3^2;
unsigned char coutern,compare;
void yundong() //
{
M1A = 0;
M1B = 1;
M2A = 0;
M2B = 1;
M3A = 1;
M3B = 0;
M4A = 1;
M4B = 0;
}
void Timer0_Init(void) //100微秒@11.0592MHz
{
// AUXR &= 0x7F; //定时器时钟12T模式
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x01; //设置定时器模式
TL0 = 0xA4; //设置定时初始值
TH0 = 0xFF; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ET0 = 1;
EA = 1;
PT0=0;
}
void Timer0_Serve() interrupt 1
{
TL0 = 0xA4; //设置定时初始值
TH0 = 0xFF; //设置定时初始值
compare = 10;
coutern ++;
if(coutern > 100)
{
coutern = 0;
}
if(coutern < compare)
{
EN1A = 1;
EN1B = 1;
EN2A = 1;
EN2B = 1;
}
else
{
EN1A = 0;
EN1B = 0;
EN2A = 0;
EN2B = 0;
}
}
void main()
{
Timer0_Init();
while(1)
{
yundong();
}
}
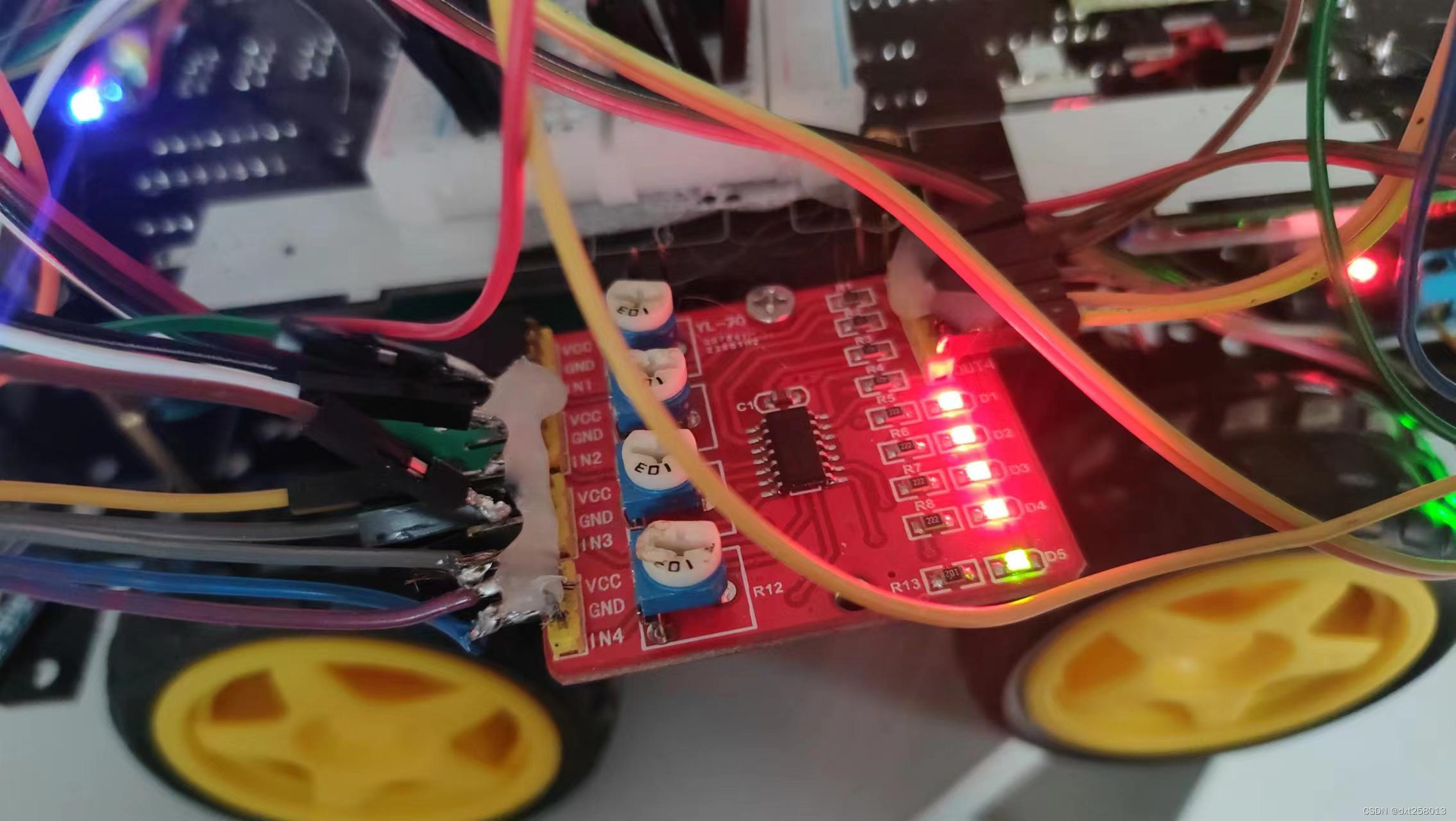
2. .循迹模块
这里使用的四路循迹模块
部分端口介绍:主板的OUT1-4端分别连接单片机的IO口,用于检测输出电平主板另一排针侧的VCC GND IN1-4端分别和探头部分对应连接IN端连接OUT端。
模块原理:当探头的红外发射管发射光线经地面反射进入接收管。输出端输出低电平,主板对应的led灯不亮。如果地面有黑色区域将吸收光线,接收管接收不到光线输出端就会输出高
电平,主板的led灯会被点亮。
代码:
#include <REGX52.H>
#include <intrins.H>
#include <Delay.h>
#include <xingshi.h>
sbit D1 = P2^7; //D1,D2为右边循迹模块
sbit D2 = P2^6;
sbit D3 = P2^5; //D3,D4为左边循迹模块
sbit D4 = P2^4;
void xunji() //高电平检测到,低电平为检测
{
if(D1==1&&D2==1&&D3==1&&D4==1) //检测到黑线,无返回
{
qianji();
}
//*****************************************
if(D1==0&&D2==1&&D3==0&&D4==0) //右边检测到黑线,小车偏左,让车向右移动
{
youzhuan();
if(D1==0&&D2==0&&D3==0&&D4==0) //无黑线,检测到白线
{
qianji();
}
}
//******************************************
if(D1==0&&D2==0&&D3==1&&D4==0) //左边检测到黑线,小车偏右,让车向左移动
{
zuozhuan();
if(D1==0&&D2==0&&D3==0&&D4==0) //无黑线,检测到白线
{
qianji();
}
}
//***********************************************
if(D1==0&&D2==0&&D3==1&&D4==1) //左边检测到黑线,直角左拐
{
qianji();
Delay(50); //直角左拐前延时50ms
if(D1==0&&D2==0&&D3==0&&D4==0) //无黑线,检测到白线
{
tingzhi();
Delay(50);
zuozhuan();
}
}
//*********************************************
if(D1==0&&D2==0&&D3==1&&D4==1) //右边检测到黑线,直角右拐
{
qianji();
Delay(50); //直角右拐前延时50ms
if(D1==0&&D2==0&&D3==0&&D4==0) //无黑线,检测到白线
{
tingzhi();
Delay(50);
youzhuan();
}
}
//***************************************************
}
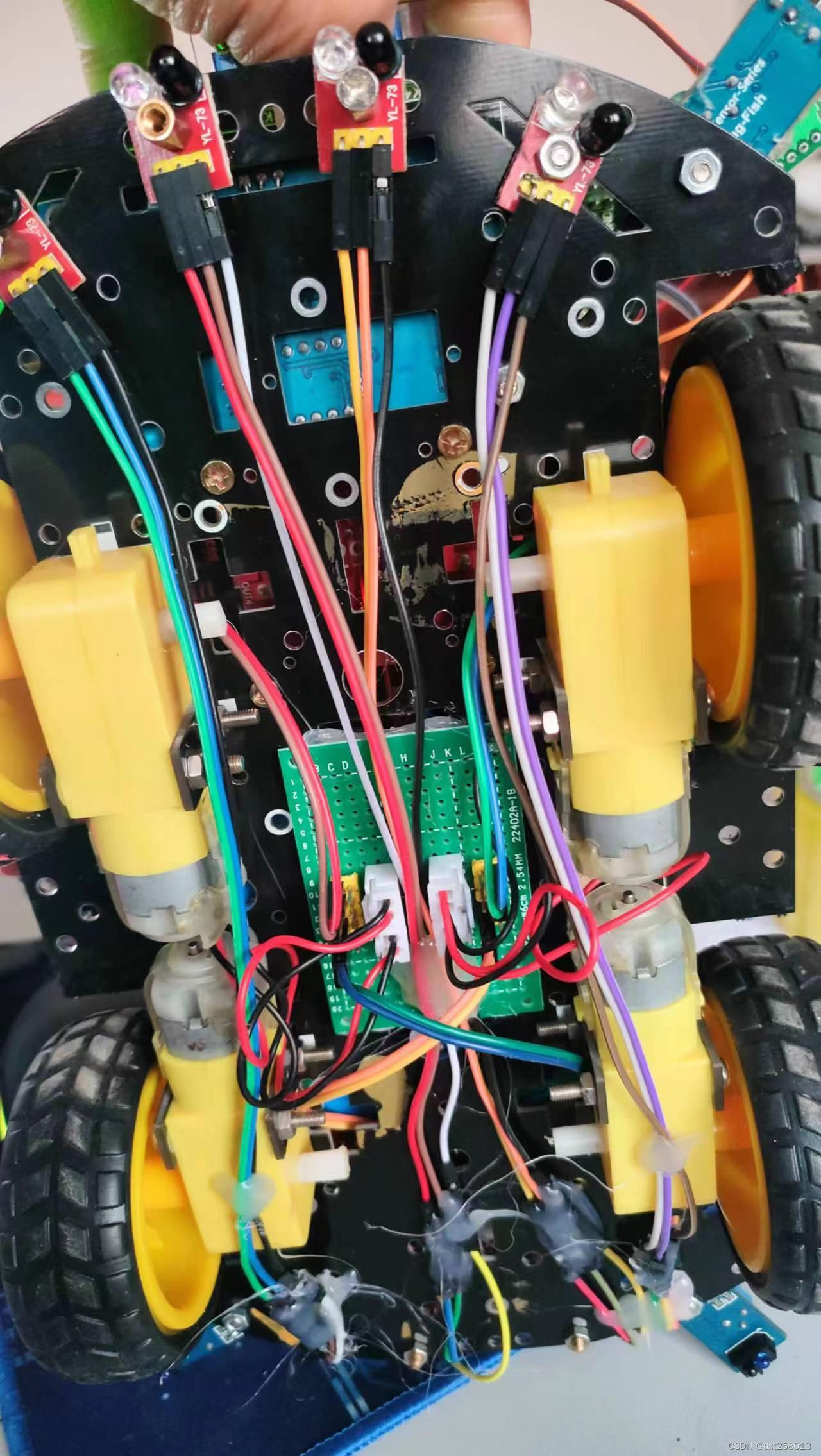
3. 红外避障模块
该传感器模块对环境光线适应能力强,其具有一对红外线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接回输出数字信号(一个低电平信号),可通过电位器旋钮调节检测距离,有效距离范围2~30cm,工作电压为3.3v-5v。该传感器的探测距离可以通过电位器调节、具有干扰小、便于装配、使用方便等特点,可以广泛应用于机器人避障、避障小车、流水线计数及黑白线循迹等众多场合。\n\n模块参数\n当模块检测到前方障碍物信号时,电路板上绿色指示灯点亮,同时OUT端口持续输出低电平信号\n\n该模块测距离2~~30cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。\n\n传感器主动红外线反射探测,因此目标的反射率和形状是探测距离的关键。其中黑色探测距离小,白色大;小面积物体距离小,大面积距离大。\n\n传感器模块输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5v继电器\n\n比较器采用LM393,工作稳定;\n\n可采用3-5v直流电源对模块进行供电。当电源接通时,红色电源指示灯点亮;\n\n具有3mm的螺丝孔,便于固定、安装;\n\n电路板尺寸:3.2CM*1.4CM\n\n每个模块在发货已经将阈值比较电压通过电位器调节好,非特殊情况,请勿随意调节电位器。\n\n接口说明\n1.VCC外接3.3v-5v电压(可以直接与5v单片机和3.3v单片机相连)\n\n2、GND 外接GND\n\n3、OUT小板数字量输出接口(0和1)。
代码:
#include <REGX52.H>
#include <Delay.H>
#include <xingshi.H>
sbit out1 = P1^1; //左边的红外探头
sbit out2 = P1^2; //右边的红外探头
void HWbizhang()
{
if(out1 == 0) //左边检测到障碍物
{
tingzhi() ; //小车停止
Delay(500); //停止500ms
houtui(); //小车后退
Delay(1000); //后退1000ms
youzhuan(); //小车右转
Delay(2000);
qianji();
}
if(out2 == 0) //右边检测到障碍物
{
tingzhi() ; //小车停止
Delay(500); //停止500ms
houtui(); //小车后退
Delay(1000); //后退1000ms
zuozhuan(); //小车左转
Delay(2000);
qianji();
}
if((out1 == 1)&&(out2 == 1))
{
qianji();
}
if((out1 == 0)&&(out1 == 0))
{
tingzhi() ; //小车停止
Delay(500); //停止500ms
houtui(); //小车后退
Delay(1000); //后退1000ms
youzhuan(); //小车右转
Delay(2000);
qianji();
}
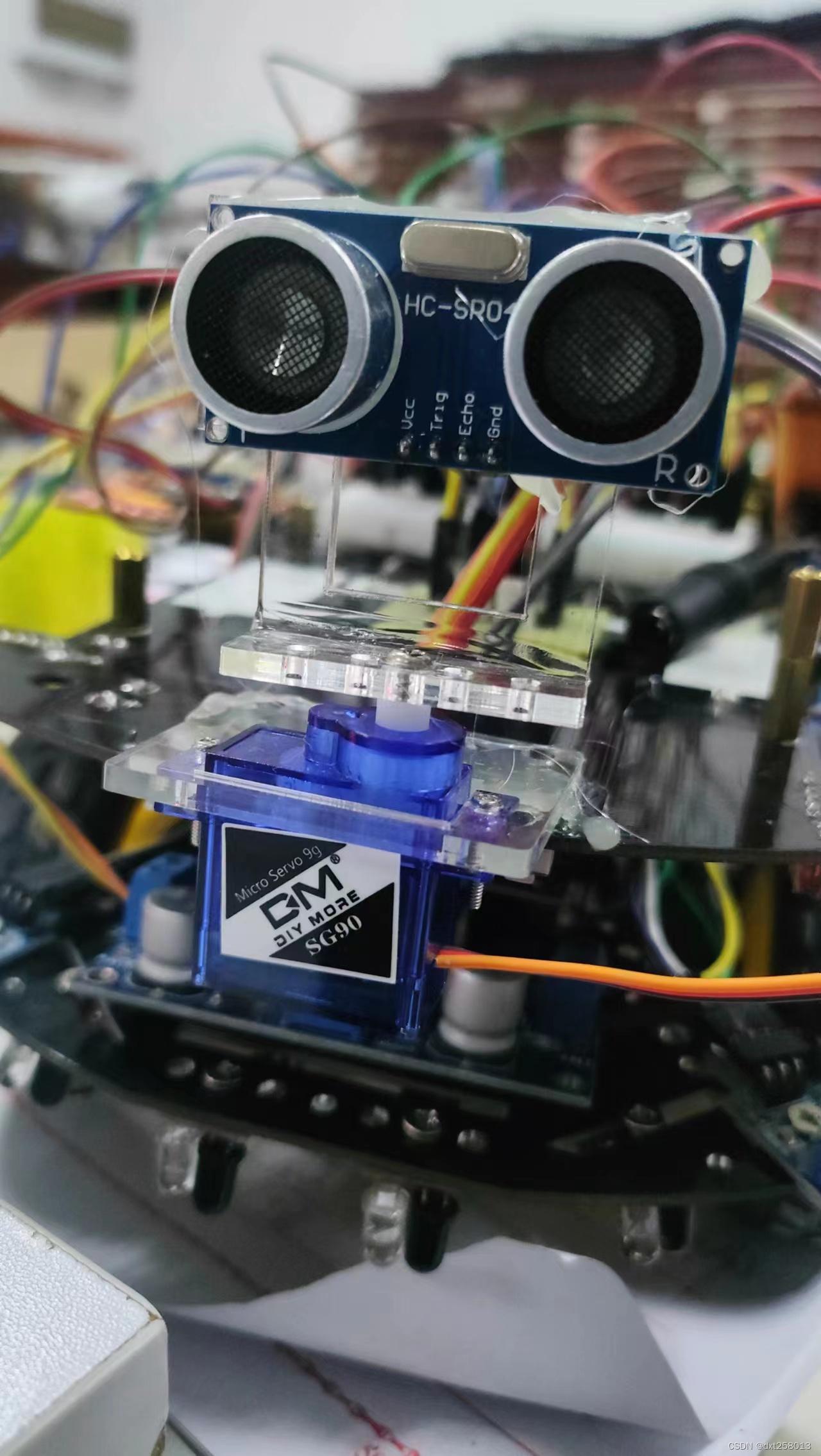
}4.超声波避障模块
(1)给超声波模块接入电源和地
(2)给脉冲触发引脚(trig)输入一个长为20us的高电平方波
(3)输入方波后,模块会自动发射8个40KHz的声波,与此同时回波引脚echo端的电平会由0变为1;(此时应该启动定时器计时)
(4)当超声波返回被模块接收到时,回波引脚端的电平会由1变为0;(此时应该停止定时器计数),定时器记下的这个时间即为超声波由发射到返回的总时长
根据声音在空气中的速度为344米/秒,即可计算出所测的距离。

代码
#include <REGX52.H>
#include <intrins.H>
#include <xingshi.H>
#include <Timer.H>
sbit Trig = P2^1;
sbit Echo = P2^2;
unsigned char sum; //超声波测距
unsigned char stence; //与障碍物的限制距离
//***************************************************
void Delay1000ms() //@11.0592MHz 延时一秒
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
//**********************************************
void Delay20us() //@11.0592MHz 延时20us
{
unsigned char i;
_nop_();
i = 6;
while (--i);
}
//******************************************
void chaoshengbo()
{
TMOD &= 0x0F; //设置定时器模式
TL1 = 0; //设置定时初始值
TH1 = 0; //设置定时初始值
Trig = 1; //发射20US的脉冲
Delay20us();
Trig = 0; //关闭
while(!Echo);//等待返回脉冲
TR1 = 1; //打开定时器1
while(!Echo);//返回脉冲结束
TR1 = 0; //关闭定时器1
sum = ((TH1*256+TL1)*0.034)/2+1; //计算距离公式
if( stence > sum)
{
tingzhi();
Delay1000ms();
}
}
5. 蓝牙模块
蓝牙模块的介绍:
蓝牙模块可通过与单片机的串口相连,借助电脑或手机的蓝牙与单片机实现异步全双工通信。常见的蓝牙模块有HC-05主从一体蓝牙模块、HC-06从机蓝牙模块、低功耗BLE蓝牙模块(cc2540或cc2541)。不同的蓝牙模块的AT指令集不完全相同。
工作模式:AT模式,这时我们可以给模块发AT指令,从而可以查询模块的参数或者对模块进行设置。此时指示灯为慢闪状态。\n透传模式,就是当蓝牙模块连接上之后,我们可以直接发送数据给蓝牙模块,而蓝牙模块不管我们发的是什么,都直接传给对方。(这时发AT命令是无效的。)
蓝牙模块的使用:设置使用蓝牙模块的第一步为设置参数,如波特率等。方法为将USB转TTL模块与蓝牙模块连接,连接方法为\n\n并将USB转TTL模块插入电脑,检查设备管理器是否显示串口。然后使用串口调试助手写入AT指令进行查询或操作指令。蓝牙模块的响应将在串口调试助手的接收区显示。


代码:
#include <REGX52.H>
#include <intrins.H>
#include <xingshi.H>
#define left 'C'
#define right 'D'
#define up 'A'
#define down 'B'
#define stop 'F'
unsigned char U_data; //接受数据存放
unsigned char Way;
void UartInit(void) //9600bps@11.0592MHz
{
PCON &= 0x7F; //波特率不倍速
SCON = 0x50; //8位数据,可变波特率
//AUXR &= 0xBF; //定时器时钟12T模式
//AUXR &= 0xFE; //串口1选择定时器1为波特率发生器
TMOD &= 0x0F; //设置定时器模式
TMOD |= 0x20; //设置定时器模式
TL1 = 0xFD; //设置定时初始值
TH1 = 0xFD; //设置定时重载值
ET1 = 0; //禁止定时器中断
TR1 = 1; //定时器1开始计时
EA = 1;
ES = 1;
}
void receive(unsigned char m)
{
switch(m)
{
case 'A': //前进
qianji();
break;
case 'C':
zuozhuan(); // 左转
break;
case 'D':
youzhuan(); // 右转
break;
case 'B':
houtui(); // 后退
break;
case 'F': // 停止
tingzhi();
break;
}
}
//***************************************************************************
void UartInit_seve() interrupt 4
{
tingzhi();
RI = 0; //清除接受中断标志位
U_data = SBUF; //接受数据
receive(U_data);
}
三、其余模块
1.sg90舵机
SG90舵机简介
SG90舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。
SG90舵机应用
SG90舵机目前在高档遥控玩具,如航模、包括飞机模型、潜艇模型、遥控机器人中已经使用得比较普遍。
SG90舵机导线
SG90舵机上有三根线,分别是GND(棕色线)、VCC(红色线)和SIG(黄色线),也就是地线、电源线和信号线。
SG90舵机工作原理
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms 的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。
#include <REGX52.H>
#include <intrins.H>
#include <Delay.h>
#include <xingshi.h>
#include <Timer1.h>
sbit PWM = P1^0; //型号输入点
unsigned char counter,angle; //计数值和旋转角度
void Timer1_Init() //500微秒@11.0592MHz
{
// AUXR &= 0xBF; //定时器时钟12T模式
TMOD &= 0x0F; //设置定时器模式
TL1 = 0x33; //设置定时初始值
TH1 = 0xFE; //设置定时初始值
TF1 = 0; //清除TF1标志
TR1 = 1;
ET1 = 1;
EA = 1;
PT1 = 1;
}
//**************************************************
void Timer1_Sever() interrupt 3
{
TL1 = 0x33; //设置定时初始值
TH1 = 0xFE; //设置定时初始值
counter++;
if(counter >= 40) //设置周期为2毫秒
{
counter=0;
}
if(counter < angle)
{
PWM = 1;
}
else
{
PWM = 0;
}
}
//************************************************************
void Duoji() //定时器定时500微妙
{
counter = 0;
angle = 1; // 0度
Delay(500);
counter = 0;
angle = 2; // 45度 (-45)
Delay(500);
counter = 0;
angle = 3; // 90度(正)归中
Delay(500);
Delay(500);
counter = 0; // 135度 (+45)
angle = 4;
Delay(500);
counter = 0;
angle = 5; // 180度
Delay(500);
}
2.稳压模块
LM2596属于常用的开关电源芯片,其最高输入电压为40V,最高输出电压为37V,LM2596有4个版本,3个固定输出版本3.3V、5V、 12V,以及一个ADJ可调版本,最大输出电流3A,转换效率可达80%~90%左右,使用DCDC模块1205模块实现12V转5V输出,使用1205模块进行电压转换原理也简单,还有一个优点就是输入与输出隔离,该芯片输 出功率2W,最大输出电流400mA。
四、总结
基于51单片机的智能小车种类很多,博主也是初学者,文中右错误的地方请大家指正,希望本片文章对大家右帮助,大家一起加油!!!
转自:https://blog.csdn.net/dxt258013/article/details/129900598