
一、 基本概念
1.1 基本概念
一个理想放大器的输出 y ( t ) y(t) y(t)是输入 x ( t ) x(t) x(t)的线性复制。真实情况下,在一个足够窄的范围,x变化很小,输出信号是叠加在偏置点上a0上的,a0可认为是工作(偏置)点,a1可认为是小信号增益,输入随输出变化时线性的因此把总的输出表示为:
y ( t ) ≈ a 0 + a 1 x ( t ) y ( t ) ≈ a _ { 0 } + a _ { 1 } x ( t ) y(t)≈a0+a1x(t)
输入信号幅度很大时,晶体管的偏置点受到很大的扰动,此时放大器的输入特性可用一个多项式来近似:
y ( t ) = a 0 + a 1 x ( t ) + a 2 x 2 ( t ) + ⋯ y ( t ) = a _ { 0 } + a _ { 1 } x ( t ) + a _ { 2 } x ^ { 2 } ( t ) + \cdots y(t)=a0+a1x(t)+a2x2(t)+⋯
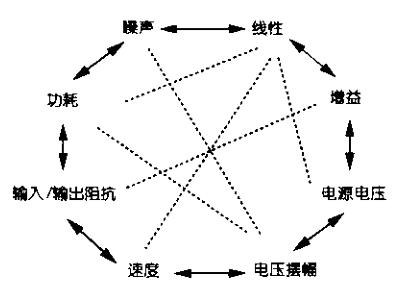
1.2 八边形法则
增益、速度、功耗、电源电压、线性度、噪声、输入输出阻抗、最大电压摆幅八种性能参数相互牵制,导致设计成为多维优化问题
1.3 两种分析方法
1.3.1 大信号分析
直流传输特性、直流偏置点分析
1.3.2 小信号分析
直流偏置点附近的小信号分析
二、共源极
2.1 电阻负载
电路结构

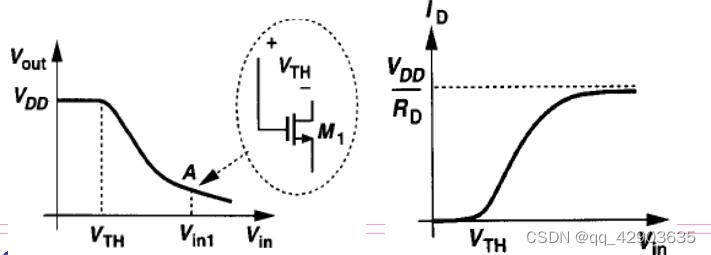
2.1.1 大信号分析
漏电流与输入电压的关系
I D = ( V D D − V o u t ) / R D I _ { D } = ( V _ { D D } – V _ { o u t } ) / R _ { D } ID=(VDD−Vout)/RD
截止区 Vin<VTH:Vout=VDD,ID≈0
饱和区 Vin>VTH: V o u t = V D D − 1 2 u n C o x W L ( V i n − V T H ) 2 × R D V _ { o u t } = V _ { D D } – \frac { 1 } { 2 } u _ { n } C _ { o x} \frac { W } { L } ( V _ { i n } – V _ { T H } ) ^ { 2 } \times R _ { D } Vout=VDD−21unCoxLW(Vin−VTH)2×RD
线性区Vin>VTH+Vout: V o u t = V D D − μ n C o x W L [ ( V i n − V T H ) V o u t − 1 2 V o u t 2 ] × R D V_{out}=V _ { D D } – μ _ { n } C _ { o x } \frac { W } { L } [ ( V _ { i n } – V _ { T H } ) V _ { out } – \frac { 1 } { 2 } V _ { out } ^ { 2 } ] \times R _ { D } Vout=VDD−μnCoxLW[(Vin−VTH)Vout−21Vout2]×RD
深三极管区 V o u t < 2 ( V i n − V T H ) V _ { out } \lt 2 ( V _ { i n } – V _ { T H } ) Vout<2(Vin−VTH)时,源漏之间的通道可以用一个线性电阻来表示 R o n = 1 u n C o x W L ( V G S − V T H ) R _ { o n } = \frac { 1 } { u _ { n } C _ { o x } \frac { W } { L } ( V _ { G S } – V _ { T H } ) } Ron=unCoxLW(VGS−VTH)1
此时有 V o u t = V D D 1 + u n C o x W L ( V G S − V T H ) R D V _ { o u t} = \frac { V _ { D D } } { 1 + u _ { n } C _ { o x } \frac { W } { L } ( V _ { G S } – V _ { T H } ) R _ { D } } Vout=1+unCoxLW(VGS−VTH)RDVDD
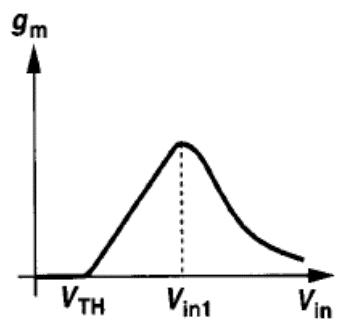
跨导与输入电压关系
饱和区: g m = ∂ I D ∂ V i n = u n C o x W L ( V i n − V T H ) g _ { m } = \frac { \partial I _ { D } } { \partial V _ { i n } } = u _ { n } C _ { o x } \frac { W } { L } ( V _ { i n } – V _ { T H } ) gm=∂Vin∂ID=unCoxLW(Vin−VTH)
线性区: g m = ∂ I D ∂ V i n = μ n C o x W L V o u t g _ { m } = \frac { \partial I _ { D } } { \partial V _ { i n } } = μ_ { n } C _ { o x } \frac { W } { L } V _ { o u t } gm=∂Vin∂ID=μnCoxLWVout
2.1.2 小信号分析
增益
V o u t = V D − R D × 1 2 μ n C o x W L ( V i n − V T H ) 2 V _ { o u t } = V _ { D } – R _ { D } \times \frac { 1 } { 2 } μ_ { n } C _ { o x } \frac { W } { L } ( V _ { i n } – V _ { TH} ) ^ { 2 } Vout=VD−RD×21μnCoxLW(Vin−VTH)2 A v = ∂ V o u t ∂ V i n = − R D × μ n C o x ( V i n − V T H ) = − g m R D A _ { v } = \frac { \partial V _ { o u t } } { \partial V _ { i n } } = – R _ { D } \times μ _ { n } C _ { ox } ( V _ { i n } – V _ { T H } ) = – g _ { m } R _ { D } Av=∂Vin∂Vout=−RD×μnCox(Vin−VTH)=−gmRD
增益最大化
g m = − 2 μ n C o x W L I D g_{m}=- \sqrt{2 \mu _{n}C_{ox}\frac{W}{L}I_{D}} gm=−2μnCoxLWID,增益还可以写成
A v = − 2 μ n C o x W L I D V R D I D A _ { v } = – \sqrt { 2 μ _ { n} C _ { ox } \frac { W } { L } I _ { D }} \frac { V _ { RD } } { I _ { D } } Av=−2μnCoxLWIDIDVRD
- 增大W/L,导致器件电容增大
- 增大电阻RD上的电阻VRD,将限制最大摆幅
- VRD不变,同时减小ID,则RD必须增大,会导致输出节点时间常数增大
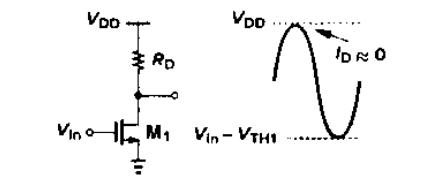
2.1.3 输出摆幅
- Vin刚好大于VTH时,输出电压接近VDD
- Vin-VTH=Vout,M1处于线性区和饱和区边缘时,输出电压最小
2.1.4 考虑沟长调制效应的小信号分析
画出小信号电路图
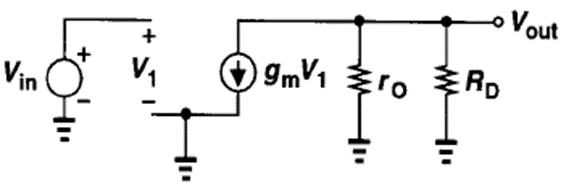
V o u t = V D D − 1 2 u n C o x W L ( V i n − V T H ) 2 ( 1 + λ V o u t ) × R D V _ { o ut } = V _ { D D } – \frac { 1 } { 2 } u _ { n } C _ { o x } \frac { W } { L } ( V _ { i n } – V _ { T H } ) ^ { 2 } ( 1 + λ V _ { o u t } ) \times R _ { D } Vout=VDD−21unCoxLW(Vin−VTH)2(1+λVout)×RD
对Vin求偏导有
A v = − g m ( R D / / r o ) A _ { v } = – g _ { m } ( R _ { D } // r_ { o } ) Av=−gm(RD//ro)
或者由KCL求解方程同样可得增益
g m V i n + V o u t ( R D / / r o ) = 0 g _ { m } V _ { i n } + \frac { V _ { o u t } } { ( R _ { D } // r_ { o } ) } = 0 gmVin+(RD//ro)Vout=0 当负载电阻非常大时(负载为电流源)
A v = − g m ( R D / / r o ) ≈ − g m r 0 A _ { v } = – g _ { m } ( R _ { D } / /r _ { o } ) ≈- g _ { m } r _ { 0 } Av=−gm(RD//ro)≈−gmr0 gmro称为晶体管的本征增益,代表用单个器件能够得到的最大电压增益
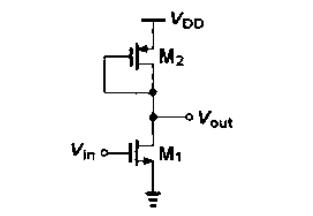
2.2 二极管型负载
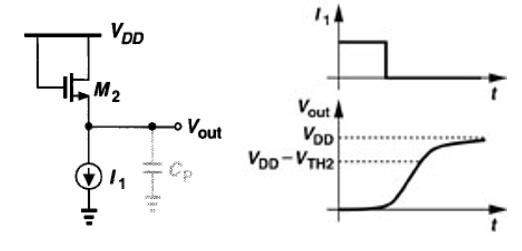
2.2.1 大信号特性
- 在I1减小的同时,M2的过驱动电压也减小。当I1小到有VGS≈VTH2时,Vout≈VDD-VTH2
- 实际上,如果IDD接近于零时,M2的亚阈值电导最终会使Vout=VDD。但电流很小时,输出节点处有限的电容会减缓从VDD-VTH2到VDD的变化
- 具有频繁开关动作的电路中,当电流IDD降到很小时,,Vout保持在VDD-VTH2附近
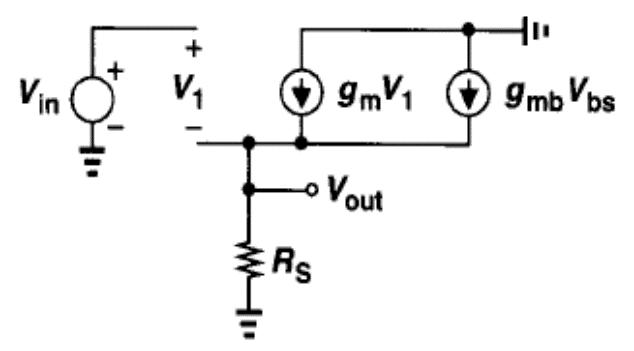
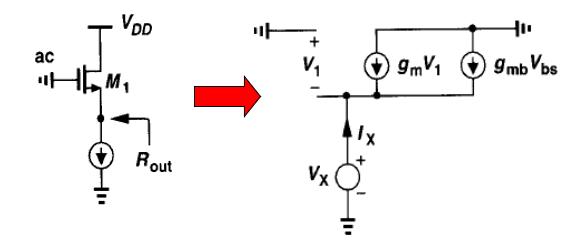
2.2.2 小信号分析
二极管负载等效电阻
不考虑体效应时
V x I x = ( 1 / g m ) / / r o ≈ 1 / g m \frac { V _ { x } } { I _ { x } } =(1/g_{m})//r_{o}\approx 1/g_{m} IxVx=(1/gm)//ro≈1/gm 考虑体效应时
V x I x = 1 g m + g m b / / r o ≈ 1 g m + g m b \frac { V _ { x } } { I _ { x } } = \frac { 1 } { g _ { m } + g _ { m b } } // r_ { o } \approx \frac { 1 } { g _ { m } + g _ { m b } } IxVx=gm+gmb1//ro≈gm+gmb1
增益
A v = − g m 1 R D = − g m 1 g m 2 + g m b 2 = − g m 1 g m 2 1 1 + η A _ { v } = – g _ { m1 } R _ { D } = – \frac { g _ { m1 } } { g _ { m 2 } + g _ { m b 2 } } = – \frac { g _ { m 1 } } { g _ { m 2 } } \frac { 1 } { 1+η } Av=−gm1RD=−gm2+gmb2gm1=−gm2gm11+η1 其中, η = g m b 2 / g m 2 = ∂ V T H ∂ V S B η = g _ { m b 2 } / g _ { m 2 }= \frac { \partial V _ { TH } } { \partial V _ { SB } } η=gmb2/gm2=∂VSB∂VTH
又有跨导 g m = 2 I D μ n C o x W / L g _ { m } = \sqrt { 2 I _ { D } μ_{n} C _ { o x } W / L } gm=2IDμnCoxW/L,代入上式有:
A v = − ( W / L ) 1 ( W / L ) 2 1 1 + η A_{v}=- \frac{\sqrt{(W/L)_{1}}}{\sqrt{(W/L)_{2}}}\frac{1}{1+ \eta} Av=−(W/L)2(W/L)11+η1
同样的,对PMOS二极管负载,由于没有体效应,所以有增益:
A v = − u n ( W / L ) 1 u p ( W / L ) 2 = − g m 1 g m 2 A _ { v } = – \frac { \sqrt { u _ { n } ( W / L ) _ { 1 } } } { \sqrt { u _ { p } ( W / L ) _ { 2 } } }=- \frac { g _ { m 1 } } { g _ { m 2 } } Av=−up(W/L)2un(W/L)1=−gm2gm1
增大增益
- 二极管连接负载共源极的增益是器件尺寸的弱函数,高增益会造成晶体管的宽度或沟道长度过大而不均衡
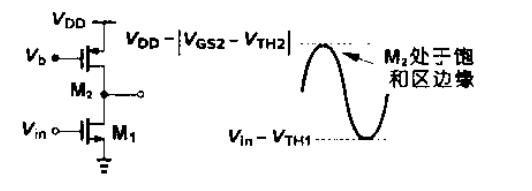
- 允许的输出摆幅减小,如下图
u n ( W L ) 1 ( V G S 1 − V T H 1 ) 2 ≈ μ p ( W L ) 2 ( V G S 2 − V T H 2 ) 2 u _ { n } ( \frac { W } { L } )_{1} ( V _ { G S 1 } – V _ { T H 1 } ) ^ { 2 } \approx μ _ { p } ( \frac { W } { L } ) _ { 2 } ( V _ { GS 2 } – V _ { T H 2 } ) ^ { 2 } un(LW)1(VGS1−VTH1)2≈μp(LW)2(VGS2−VTH2)2 A v = ∣ V G S 2 − V T H 2 ∣ V G S 1 − V T H 1 = V D D − V o u t − ∣ V T H 2 ∣ V i n − V T H 1 A _ { v } = \frac { | V _ { G S2 } – V _ { T H 2 } | } { V _ { G S 1 } – V _ { T H 1 } } = \frac { V _ { D D } – V _ { o u t } – |V _ { T H 2 } | } { V _ { i n } – V _ { T H 1 } } Av=VGS1−VTH1∣VGS2−VTH2∣=Vin−VTH1VDD−Vout−∣VTH2∣ 若μn=2μp,要达到10倍增益,M1的过驱动电压为200mV,|VTH2|=0.7V,则|VGS2|=2.7V,因为Vout,min=VDD-|VGS2|,所以最小输出电压上升,即输出摆幅下降
2.2.3 输出摆幅(负载为PMOS)
- 保证M1和M2都工作在饱和区时的输出范围,对M2满足VGS2>VTH2,对M1满足Vout>Vin-VTH1
- Vout,min = VDD – |VGS2|,此时IDD处于饱和电流与线性电流分界点,VGS2最大
- Vout,max=VDD – |VTH2|,此时IDD比较小,M2刚好导通且处于饱和状态
2.2.4 增大摆幅
如下图,M1工作在饱和区,漏电流为I1,在电路上增加一个电流源IS=0.75I1
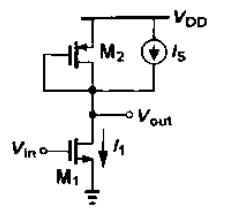
A v ≈ − g m 1 g m 2 = − 4 u n ( W / L ) 1 u p ( W / L ) 2 A_{v}≈- \frac { g _ { m 1 } } { g _ { m 2 } }=- \sqrt { \frac { 4 u _ { n } ( W / L ) _ { 1 } } { u _ { p } ( W / L ) _ { 2 } } } Av≈−gm2gm1=−up(W/L)24un(W/L)1 同时, μ n ( W L ) ( V G S 1 − V T H 1 ) 2 ≈ 4 μ p ( W L ) 2 ( V G S 2 − V T H 2 ) 2 μ _ { n } ( \frac { W } { L } ) ( V _ { G S 1 } – V _ { T H 1 } ) ^ { 2 } \approx 4 μ _ { p } ( \frac { W } { L } ) _ { 2 } ( V _ { G S 2 } – V _ { T H 2 } ) ^ { 2 } μn(LW)(VGS1−VTH1)2≈4μp(LW)2(VGS2−VTH2)2 A v ≈ − 4 ∣ V G S 2 − V T H 2 ∣ V G S 1 − V T H 1 A _ { v } \approx – \frac { 4 | V _ { G S 2 } – V _ { T H 2 } | } { V _ { G S 1 } – V _ { T H 1 } } Av≈−VGS1−VTH14∣VGS2−VTH2∣ 上式说明,同样要达到10倍增益,M1的过驱动电压为200mV,|VTH2|=0.7V的情况下,|VGS2|=1.2V,相比没加电流源时|VGS2|=2.7V,使输出最低电压下降,增大了摆幅
2.3 电流源负载
对于电阻或者二极管连接的负载而言,增大阻值会消耗直流压降,从而限制输出电压的摆幅,用不服从欧姆定律的电流源来替代负载
A v = − g m 1 R o u t = − g m 1 ( r o 1 / / r o 2 ) A _ { v } = – g _ { m 1 } R _ { o u t } = – g _ { m 1 } ( r _ { o 1 } // r_ { o 2 } ) Av=−gm1Rout=−gm1(ro1//ro2)
A v = − 2 u n C o x W L I D 1 ( λ 1 + λ 2 ) I D A _ { v } = – \sqrt { 2 u _ { n } C _ { ox } \frac { W } { L } I _ { D } } \frac { 1 } { ( λ _ { 1 } + λ _ { 2 } ) I _ { D } } Av=−2unCoxLWID(λ1+λ2)ID1
λ∝1/L,通过简单地增加M2的沟道长度,就可以使 ∣ V D S 2 , m i n ∣ = ∣ V G S 2 − V T H 2 ∣ | V _ { DS 2,min } | = | V _ { GS2 } – V _ { T H 2 } | ∣VDS2,min∣=∣VGS2−VTH2∣减小,但是会在M2的输出节点引入大电容
2.4 工作在线性区的NMOS负载
该电路使M2栅压偏置在足够低的电平,保证M2全部输出电压摆幅范围内工作在深线性区
R o n 2 = 1 μ p C o x ( W / L ) 2 ( V D D − V b − ∣ V T H P ∣ ) R _ { o n 2 } = \frac { 1 } { μ_ { p } C _ { o x } ( W / L ) _ { 2 } ( V _ { D D } – V _ { b } – | V _ { TH P } |) } Ron2=μpCox(W/L)2(VDD−Vb−∣VTHP∣)1
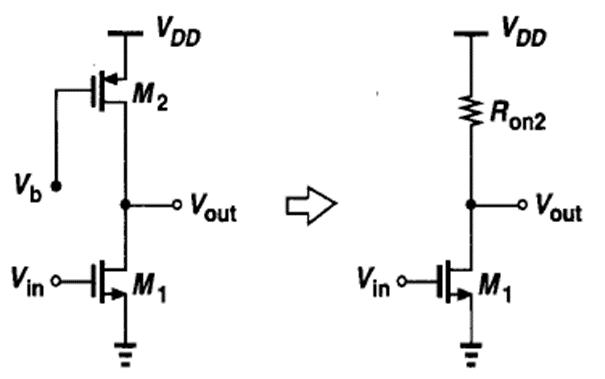
A v = − g m R o n 2 A _ { v } = – g _ { m } R _ { o n 2 } Av=−gmRon2 输出电压摆幅和电阻负载共源极相同。该电路的等效电阻Ron2受到很多参数影响,这些参数随工艺和温度的改变而改变,且提供一个精确地Vb需增加电路的复杂性
2.5 带源极负反馈的共源极
漏电流与过驱动电压之间的非线性关系引入大量非线性(gm),通过在晶体管的源端串联一个“负反馈”电阻,以使输入器件更加线性。
2.5.1 大信号分析
等效跨导
定义一个等效跨导 G m = ∂ I D ∂ V i n G_{m}= \frac{\partial I_{D}}{\partial V_{in}} Gm=∂Vin∂ID,其中 V i n = V G S 1 + I D R S V _ { i n } = V _ { G S 1 } + I _ { D } R _ { S } Vin=VGS1+IDRS,此时有,
G m = ∂ I D ∂ V i n = ∂ I D ∂ V G S 1 ∂ V G S 1 ∂ V i n = g m ∂ V G S 1 ∂ V i n = g m 1 + g m R s G_{m}= \frac{\partial I_{D}}{\partial V_{in}}= \frac{\partial I_{D}}{\partial V_{GS1}}\frac{\partial V_{GS1}}{\partial V_{in}}=g_{m}\frac{\partial V_{GS1}}{\partial V_{in}}= \frac{g_{m}}{1+g_{m}R_{s}} Gm=∂Vin∂ID=∂VGS1∂ID∂Vin∂VGS1=gm∂Vin∂VGS1=1+gmRsgm A v = − g m R D 1 + g m R s A _ { v } = – \frac { g _ { m } R _ { D } } { 1 + g _ { m } R _ { s } } Av=−1+gmRsgmRD 如果Rs>>1/gm,则Gm≈1/Rs
- 增加源极负反馈电阻,使增益是gm的弱函数,提高了线性特性
- 线性化的获得是以牺牲增益为代价的
大信号特性
Rs=0
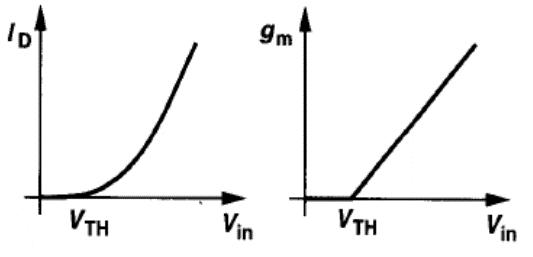
饱和区时:
g m = μ n C o x W L ( V i n − V T H ) g _ { m } = μ_ { n } C _ { o x } \frac { W } { L } ( V _ { i n } – V _ { T H } ) gm=μnCoxLW(Vin−VTH) I D = 1 2 μ n C o x W L ( V i n − V T H ) 2 I _ { D } = \frac { 1 } { 2 } μ _ { n } C _ { o x } \frac { W } { L } ( V _ { i n } – V _ { T H } ) ^ { 2 } ID=21μnCoxLW(Vin−VTH)2
Rs≠0
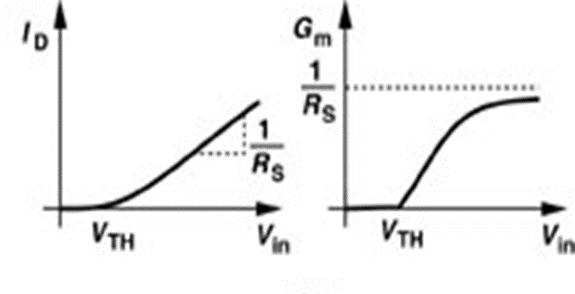
- Vin很小,M1导通时 1 / g m > R s 1 / g _ { m } \gt R _ { s } 1/gm>Rs,Gm≈gm
- Vin增加时, G m = g m 1 + g m R s G _ { m } = \frac { g _ { m } } { 1 + g _ { m } R _ { s } } Gm=1+gmRsgm
- Vin很大时,Rs>>1/gm,Gm=1/Rs
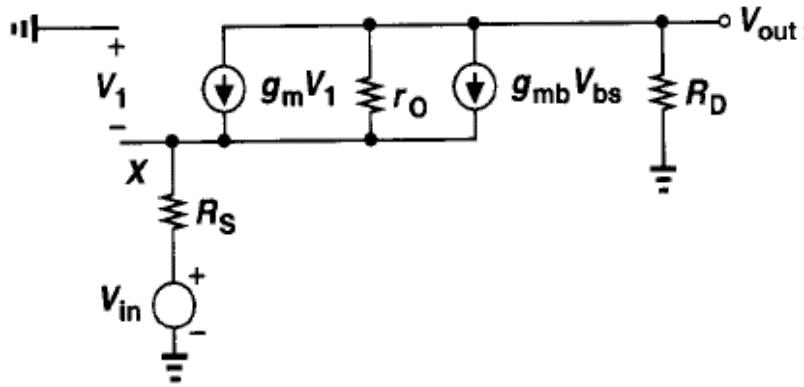
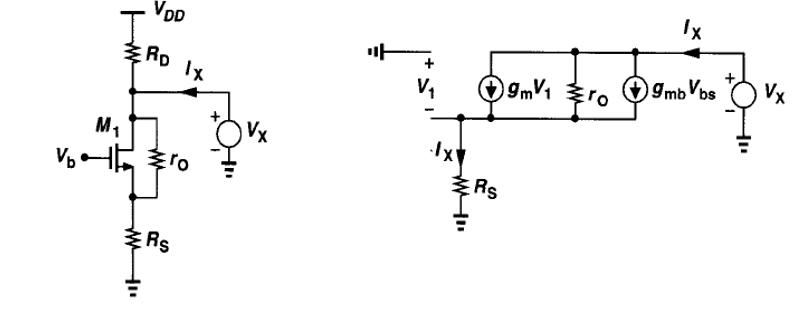
2.5.1小信号分析
辅助定理:在线性电路中,电压增益等于-GmRout,其中-Gm表示输出与地短接时电路的跨导;Rout表示当输入电压为零时电路的输出电阻
1.求Gm:直流电压源短路,直流电流源开路;输入端为Vin,输出端接地,电流为Iout;Gm=Iout/Vin
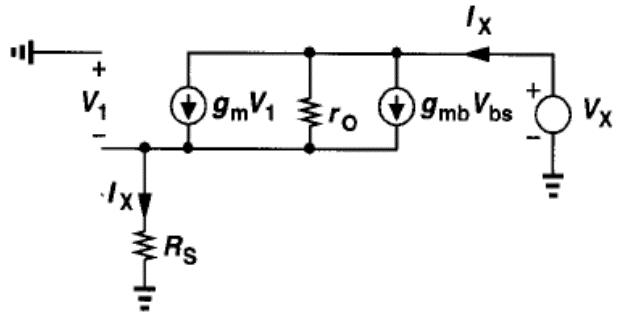
2.求Rout:直流电压源短路,直流电流源开路;输入接地;输出为Vx,Ix,Rout=Vx/Ix
等效跨导与输出电阻
I o u t = g m V 1 − V X r o + g m b V b s = g m ( V i n − I o u t R s ) − I o u t R s r o − g m b I o u t R s I_{out}=g_{m}V_{1}- \frac{V_{X}}{r_{o}}+g_{mb}V_{bs}=g_{m}(V_{in}-I_{out}R_{s})- \frac{I_{out}R_{s}}{r_{o}}-g_{mb}I_{out}R_{s} Iout=gmV1−roVX+gmbVbs=gm(Vin−IoutRs)−roIoutRs−gmbIoutRs G m = I o u t V i n = g m r o R s + [ 1 + ( g m + g m b ) R s ] r o G_{m}= \frac{I_{out}}{V_{in}}= \frac{g_{m}r_{o}}{R_{s}+ \left[ 1+(g_{m}+g_{mb})R_{s}\right] r_{o}} Gm=VinIout=Rs+[1+(gm+gmb)Rs]rogmro
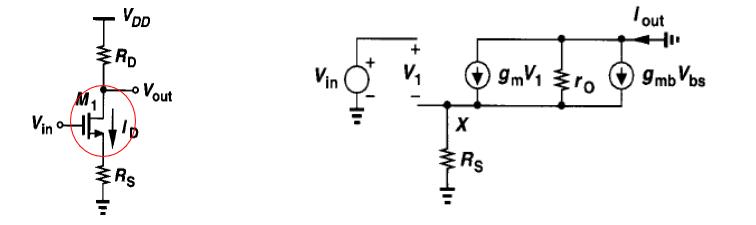
V X = [ I x + ( g m + g m b ) R s I x ] r o + I x R s V_{X}= \left[ I_{x}+(g_{m}+g_{mb})R_{s}I_{x}\right] r_{o}+I_{x}R_{s} VX=[Ix+(gm+gmb)RsIx]ro+IxRs R o u t = V X I X = [ 1 + ( g m + g m b ) R s ] r o + R s = [ 1 + ( g m + g m b ) r o ] R s + r o R_{out}= \frac{V_{X}}{I_{X}}= \left[ 1+(g_{m}+g_{mb})R_{s}\right] r_{o}+R_{s}= \left[ 1+(g_{m}+g_{mb})r_{o}\right] R_{s}+r_{o} Rout=IXVX=[1+(gm+gmb)Rs]ro+Rs=[1+(gm+gmb)ro]Rs+ro 一般 ( g m + g m b ) r 0 > > 1 ( g _ { m } + g _ { m b } ) r _ { 0 } >>1 (gm+gmb)r0>>1, R o u t ≈ [ 1 + ( g m + g m b ) R s ] r 0 R _ { o u t } \approx [ 1 + ( g _ { m } + g _ { m b } ) R _ { s } ] r _ { 0 } Rout≈[1+(gm+gmb)Rs]r0
增益
Rout很大,与RD并联后被忽略
A v = − g m R D ( g m + g m b ) R s + 1 ≈ − g m R D g m R s + 1 A _ { v } = – \frac { g _ { m } R _ { D } } { ( g _ { m } + g _ { m b } ) R _ { s } + 1 } \approx – \frac { g _ { m } R _ { D } } { g _ { m } R _ { s } + 1 } Av=−(gm+gmb)Rs+1gmRD≈−gmRs+1gmRD
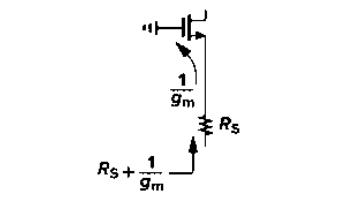
计算增益的等效方法
A v = − g m R D 1 + g m R S = − R D 1 / g m + R s A _ { v } = – \frac { g _ { m } R _ { D } } { 1 + g _ { m } R _ { S } } = – \frac { R _ { D } } { 1 / g _ { m } + R _ { s } } Av=−1+gmRSgmRD=−1/gm+RsRD
- 分母称为“在源极通路上看到的电阻”,其等于MOS器件跨导的倒数与明确的从源端看到的与地之间的电阻的串联
- 增益为从漏极结点看到的电阻除以源极通路上的总电阻
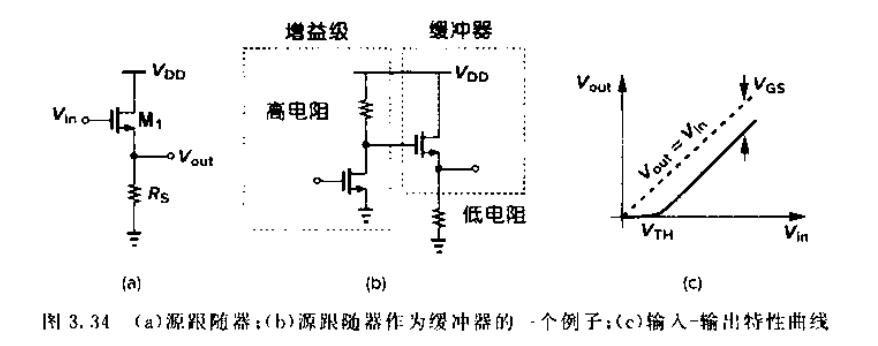
三、源跟随器(共漏极)
共源极放大器在给定电源电压下,要获得更高的电压增益,负载阻抗必须尽可能大。由于负载电阻与输出电阻是并联关系,小的负载电阻会影响整个输出阻抗,进而导致增益下降,所以这时要在放大器后面放置一个“缓冲器”,源跟随器就起这样一个缓冲作用。
源跟随器在提高输出阻抗的同时,在栅极接收信号,在源极驱动负载,使源极电势能“跟随”栅压
3.1 大信号分析
- Vin<VTH时,M1处于截止状态,Vout等于0
- Vin增大并超过VTH,M1导通进入饱和区
- Vin进一步增大,Vout跟随Vin变化,且二者之差为VGS
1 2 u n C o x W L ( V i n − V o u t − V T H ) 2 R S = V o u t \frac { 1 } { 2 } u _ { n } C _ { o x } \frac { W } { L } ( V _ { i n } – V _ { out } – V _ { T H } ) ^ { 2 } R _ { S } = V _ { out } 21unCoxLW(Vin−Vout−VTH)2RS=Vout 将 g m = μ n C o x W L ( V i n − V o u t − V T H ) g _ { m } = μ _ { n } C _ { o x } \frac { W } { L } ( V _ { i n } – V _ { out } – V _ { T H } ) gm=μnCoxLW(Vin−Vout−VTH)代入上式,并对Vin求导,其中 η = ∂ V o u t ∂ V i n η=\frac{\partial V_{out}}{\partial V_{in}} η=∂Vin∂Vout:
A v = g m R s 1 + ( g m + g m b ) R s A _ { v } = \frac { g _ { m } R _ { s } } { 1 + ( g _ { m } + g _ { m b } ) R _ { s } } Av=1+(gm+gmb)RsgmRs
3.2 小信号分析
增益
画出源跟随器小信号电路,很明显要考虑体效应,由KCL得: g m V 1 − g m b V o u t = V o u t R s g _ { m } V _ { 1 } – g _ { m b } V _ { o u t } = \frac { V _ { o u t } } { R _ { s } } gmV1−gmbVout=RsVout A v = V o u t V i n = g m R s 1 + ( g m + g m b ) R s A_{v}= \frac{V_{out}}{V_{in}}= \frac{g_{m}R_{s}}{1+(g_{m}+g_{mb})R_{s}} Av=VinVout=1+(gm+gmb)RsgmRs
- 增益<1
- 当Vin≈VTH时,增益从零开始单调增加(gm随Vin线性增加)
- 随gm变大,A接近gm/(gm+gmb) = 1/(1+η)随Vout增大而缓慢减少,所以Av趋近1
输出电阻
由KCL得: I X − g m V X − g m b V X = 0 I _ { X } – g _ { m } V _ { X } – g _ { m b } V _ { X } = 0 IX−gmVX−gmbVX=0 R o u t = 1 g m + g m b R _ { o u t } = \frac { 1 } { g _ { m } + g _ { m b } } Rout=gm+gmb1
四、共栅极
4.1 大信号分析
饱和区 V o u t = V D D − 1 2 μ n C o x W L ( V b − V i n − V T H ) 2 R D V _ { o u t } = V _ { D D } – \frac { 1 } { 2 } μ _ { n } C _ { ox } \frac { W } { L } ( V _ { b } – V _ { in } – V _ { TH } ) ^ { 2 } R _ { D } Vout=VDD−21μnCoxLW(Vb−Vin−VTH)2RD 对Vin求偏导有
A v = ∂ V o u t ∂ V i n = μ n C o x W L ( V b − V i n − V T H ) R D ( 1 + η ) = g m ( 1 + η ) R D A_{v}= \frac{\partial V_{out}}{\partial V_{in}}= \mu _{n}C_{ox}\frac{W}{L}(V_{b}-V_{in}-V_{TH})R_{D}(1+ \eta)=g_{m}(1+ \eta)R_{D} Av=∂Vin∂Vout=μnCoxLW(Vb−Vin−VTH)RD(1+η)=gm(1+η)RD
- 增益是正值
- 体效应使增益相对共源极变大了
4.2 小信号分析
增益
写出X节点和输出节点的的KVL方程,整理后得
A v = V o u t V i n = ( g m + g m b ) r o + 1 r o + ( g m + g m b ) r o R s + R s + R D R D A _ { v } = \frac { V _ { o u t } } { V _ { i n } } = \frac { ( g _ { m } + g _ { m b } ) r _ { o } + 1 } { r_ { o } + ( g _ { m } + g _ { m b } ) r _ { o } R _ { s } + R _ { s } + R _ { D } }R_{D} Av=VinVout=ro+(gm+gmb)roRs+Rs+RD(gm+gmb)ro+1RD
当Rs=0,ro>>RD及gmro>>1时 A v ≈ ( g m + g m b ) r o r o R D = ( g m + g m b ) R D = g m ( 1 + η ) R D A _ { v } \approx \frac { ( g _ { m } + g _ { m b } ) r _ { o} } { r _ { o } } R _ { D } = ( g _ { m } + g _ { m b } ) R _ { D } = g _ { m } ( 1 + η ) R _ { D } Av≈ro(gm+gmb)roRD=(gm+gmb)RD=gm(1+η)RD
输入电阻
R D I X + r o [ I X − ( g m + g m b ) V X ] = V X R _ { D } I _ { X } + r _ { o } [ I _ { X } – ( g _ { m } + g _ { m b } ) V _ { X } ] = V _ { X } RDIX+ro[IX−(gm+gmb)VX]=VX R i n = V X I X = R D + r o 1 + ( g m + g m b ) r o R _ { i n } = \frac { V _ { X } } { I _ { X } } = \frac { R _ { D } + r _ { o } } { 1 + ( g _ { m } + g _ { m b } ) r _ { o } } Rin=IXVX=1+(gm+gmb)roRD+ro 若 ( g m + g m b ) r 0 > > 1 ( g _ { m } + g _ { m b } ) r _ { 0 } >> 1 (gm+gmb)r0>>1,则有 R i n ≈ R D ( g m + g m b ) r o + 1 ( g m + g m b ) R _ { i n } \approx \frac { R _ { D } } { ( g _ { m } + g _ { m b } ) r _ { o } } + \frac { 1 } { ( g _ { m } + g _ { m b } ) } Rin≈(gm+gmb)roRD+(gm+gmb)1
- 当RD=0时,所得输入电阻结果与源跟随器在源端看到的输出电阻结果一致。因为RD=0时,电路结构和源跟随器是一样的
- 当RD趋近于无穷大(负载为电流源)时,输入阻抗也趋近于无穷,此时共栅极源极输入小信号趋近于Vin,所以可以看出其增益 A v = ( g m + g m b ) r 0 + 1 A _ { v } = ( g _ { m } + g _ { m b } ) r _ { 0 } + 1 Av=(gm+gmb)r0+1与源极是否接“反馈电阻”无关
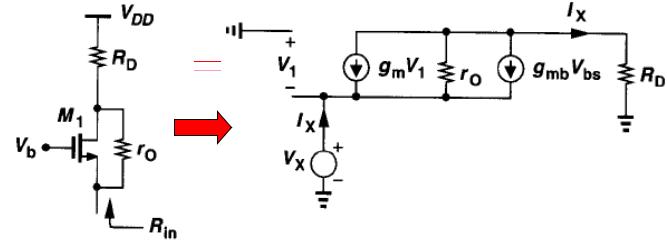
输出电阻
将图中等效电阻值代入共源极负反馈电路的输出电阻表达式中有: R o u t = { [ 1 + ( g m + g m b ) r o ] R s + r o } / / R D R _ { o u t } = \{ [ 1 + ( g _ { m } + g _ { m b } ) r _ { o } ] R _ { s } + r _ { o } \} / / R _ { D } Rout={[1+(gm+gmb)ro]Rs+ro}//RD
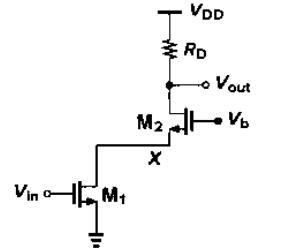
五、共源共栅级
共栅极的输入信号可以是电流(例3.17),共源极中的晶体管可以将电压信号转化为电流信号。共源极和共栅极的级联叫做共源共栅结构(cascode)。
如下图,M1产生与输入电压Vin成正比的小信号漏电流,M2仅仅是使电流流经RD。M1被称为输入器件,M2被称为共源共栅器件。
偏置条件
M1: V b − V G S 2 > ( V i n − V T H 1 ) V _ { b }- V _ { G S 2 } \gt ( V _ { i n } – V _ { T H 1 } ) Vb−VGS2>(Vin−VTH1)
M2: V o u t ≥ V i n − V T H 1 + V G S 2 − V T H 2 V _ { o u t } \geq V _ { i n } – V _ { T H 1 } + V _ { G S 2 } – V _ { T H 2 } Vout≥Vin−VTH1+VGS2−VTH2
5.1 小信号分析
5.1.1 增益
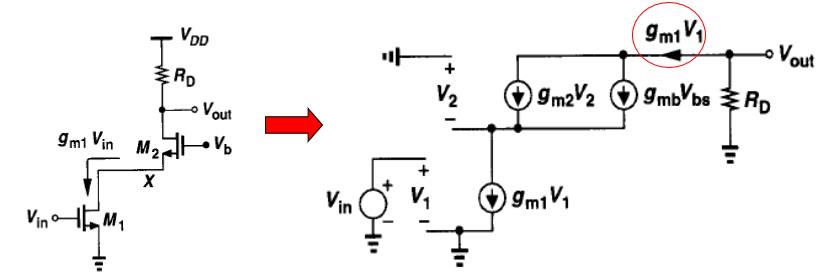
M1和M2都工作在饱和区。若λ=0,由输入管M1产生的漏电流必定流过共源共栅器件M2,且VIn=V1,因此 A v = V o u t / V i n = − g m 1 V 1 R D / V i n = − g m 1 R D A _ { v } = V _ { o u t } / V _ { i n } =- g _ { m 1 } V _ { 1 } R _ { D } / V _ { i n } =- g _ { m 1 } R _ { D } Av=Vout/Vin=−gm1V1RD/Vin=−gm1RD 若忽略沟道长度调制效应,共源共栅放大器与共源放大器具有相同的电压增益
5.1.2 增益(不考虑RD时)
电路可以看成带负反馈电阻ro1的共源极,因此输出电阻为 R o u t = r o 2 + [ 1 + ( g m 2 + g m b 2 ) r 02 ] r o 1 R_ { out } = r _ { o 2 } + [ 1 + ( g _ { m 2 } + g _ { m b 2 } ) r _ { 02 } ] r _ { o 1 } Rout=ro2+[1+(gm2+gmb2)r02]ro1 若 g m 2 r o 2 > > 1 g _ { m 2 } r _ { o 2 } >> 1 gm2ro2>>1,则 R o u t ≈ ( g m 2 + g m b 2 ) r 02 r 01 R_ { o u t } \approx ( g _ { m 2 } + g _ { m b 2 } ) r _ { 02 } r _ { 01 } Rout≈(gm2+gmb2)r02r01 输出电阻提高了 ( g m 2 + g m b 2 ) r 02 ( g _ { m 2 } + g _ { m b 2 } ) r _ { 02 } (gm2+gmb2)r02倍
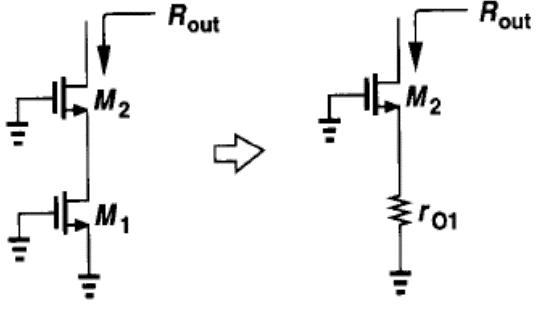
因为M1的漏电流必定流过M2,跨导与共源极相同Gm=gm
A v = − G m r o u t ≈ − g m 1 ( g m 2 + g m b 2 ) r 02 r 01 ≈ − ( g m 1 r 01 ) 2 A _ { v } = – G _ { m } r _ { out} \approx -g _ { m 1 } (g _ { m 2 } + g _ { m b 2 } ) r _ { 02 } r _ { 01 } \approx -( g _ { m1 } r _ { 01 } ) ^ { 2 } Av=−Gmrout≈−gm1(gm2+gmb2)r02r01≈−(gm1r01)2
5.1.3 提高增益的方法(相对共源极)
采用共源共栅
A v ≈ − ( g m r 0 ) 2 A _ { v } \approx -( g _ { m } r _ { 0 } ) ^ { 2 } Av≈−(gmr0)2 增益增大gmro倍,同时过驱动电压增加一倍,输出摆幅下降
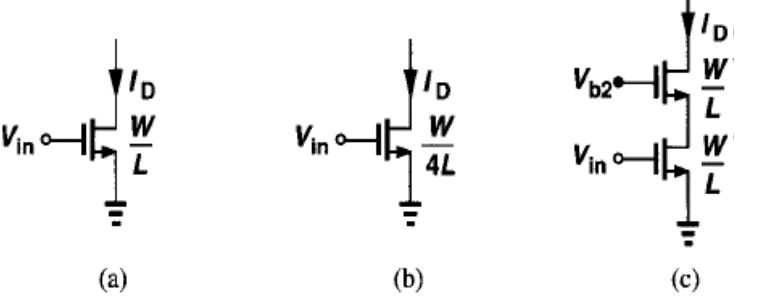
提高共源极输入器件的长度
A v = − g m r o = − μ n C o x W L I D 1 λ I D A_{v}=-g_{m}r_{o}= -\sqrt{\mu _{n}C_{ox}\frac{W}{L}I_{D}}\frac{1}{\lambda I_{D}} Av=−gmro=−μnCoxLWIDλID1 λ∝1/L,Av∝ L \sqrt{L} L,L增大n倍,Av增大n/2倍
5.1.4 共源共栅电流源负载
共源共栅结构不一定起放大器的作用,这种结构还可以用来构成恒定电流源,高的输出阻抗提供一个接近理想的电流源,但这会损失电压余度。
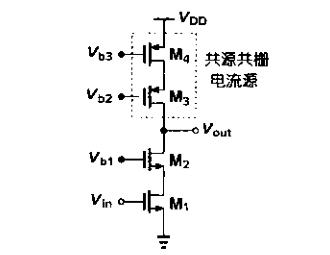
电流源变现出的输出阻抗 [ 1 + ( g m 3 + g m b 3 ) r 03 ] 04 + r 03 [ 1 + ( g _ { m 3 } + g _ { m b3 } ) r _ { 03 } ] _ { 04 } + r _ { 03 } [1+(gm3+gmb3)r03]04+r03 总的输出阻抗 R o u t = { [ 1 + ( g m 2 + g m b 2 ) r o 2 ] r o 1 + r o 2 } / / { [ 1 + ( g m 3 + g m b 3 ) r o 3 ] r o 4 + r o 3 } R _ { o u t } = \{ [ 1 + ( g _ { m 2 } + g _ { m b _ { 2 } } ) r _ { o 2 } ] r _ { o 1 } + r _ { o 2 } \} // \{ [ 1 + ( g _ { m 3 } + g _ { m b 3 } ) r _ { o3 } ] r _ { o4 } + r _ { o3 } \} Rout={[1+(gm2+gmb2)ro2]ro1+ro2}//{[1+(gm3+gmb3)ro3]ro4+ro3} 最大输出摆幅 V D D − ( V G S 1 − V T H 1 ) − ( V G S 2 − V T H 2 ) − ∣ V G S 3 − V T H 3 ∣ − ∣ V G S 4 − V T H 4 ∣ V _ { D D } – ( V _ { G S 1 } – V _ { T H 1 } ) – ( V _ { G S 2 } – V _ { T H 2 } ) – | V _ { G S 3 } – V _ { T H 3 } |- |V _ { G S 4 } – V _ { T H 4 } | VDD−(VGS1−VTH1)−(VGS2−VTH2)−∣VGS3−VTH3∣−∣VGS4−VTH4∣ 输出摆幅大约等于VDD减去4个过驱动电压
5.1.5 屏蔽特性
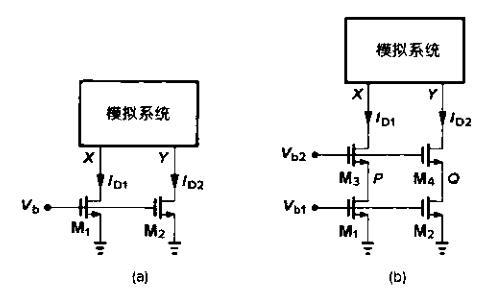
对图a有: I D 1 − I D 2 = 1 2 μ n C o x W L ( V b − V T H ) 2 ( λ Δ V ) I_{D1}-I_{D2}= \frac{1}{2}\mu _{n}C_{ox}\frac{W}{L}(V_{b}-V_{TH})^{2}(\lambda \Delta V) ID1−ID2=21μnCoxLW(Vb−VTH)2(λΔV) 对图b有: △ V P Q = △ V r o 1 [ 1 + ( g m 3 + g m b 3 ) r o 3 ] r O 1 + r O 3 ≈ △ V ( g m 3 + g m b 3 ) r o 3 △ V _ { PQ } = △ V \frac { r _ { o 1 } } { [ 1 + ( g _ { m 3 } + g m b 3 ) r o 3 ] r _ { O 1 } + r _ { O 3 } } \approx \frac { △V } { ( g _{m 3} + g _ { m b 3 } ) r _ {o 3 } } △VPQ=△V[1+(gm3+gmb3)ro3]rO1+rO3ro1≈(gm3+gmb3)ro3△V 共源共栅使ID1与ID2的失配减少了 ( g m 3 + g m b 3 ) r o 3 ( g _ { m 3 } + g _ { m b 3 } ) r _ { o3 } (gm3+gmb3)ro3倍,这在第5章电流镜中有重要应用
转自:https://blog.csdn.net/qq_42903635/article/details/131355004