
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
一、uc/OS介绍
1.1计算机系统
从用户的角度来看操作系统(Operation System,OS)的作用主要有:
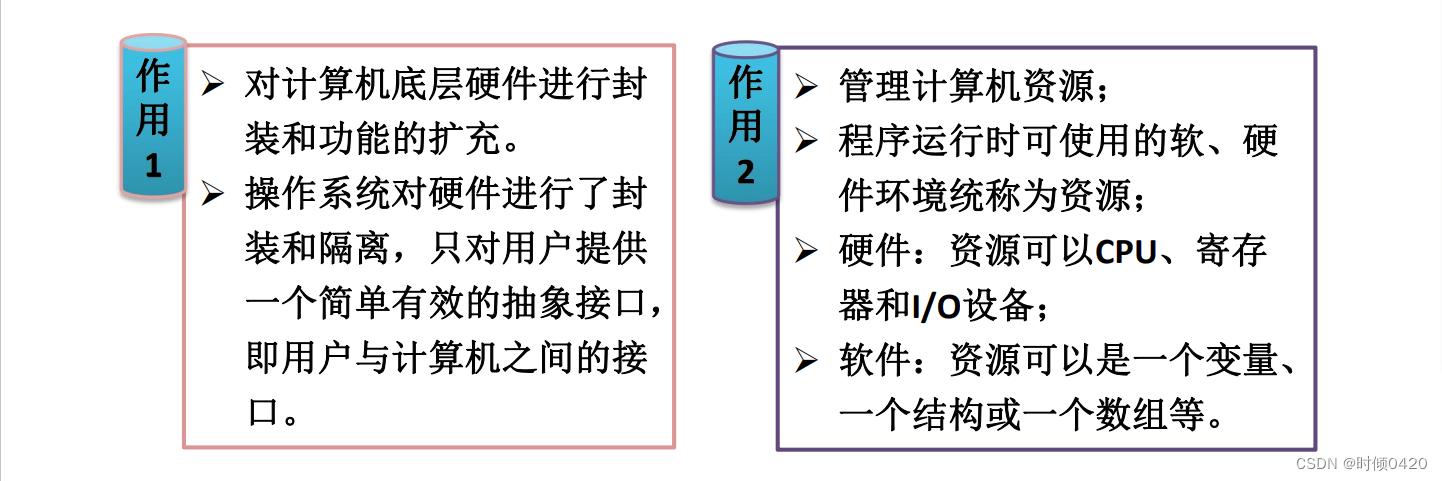
操作系统主要有五大管理功能:

1.2 嵌入式操作系统
嵌入式操作系统(Embedded Operating System,EOS)是指用于嵌入式系统的操作系统。
一般会有一个内核(Kernel),内核是指系统的一个组件,包含了操作系统的最基本、最主要功能,比如任务管理、存储管理、I/O设备管理等。
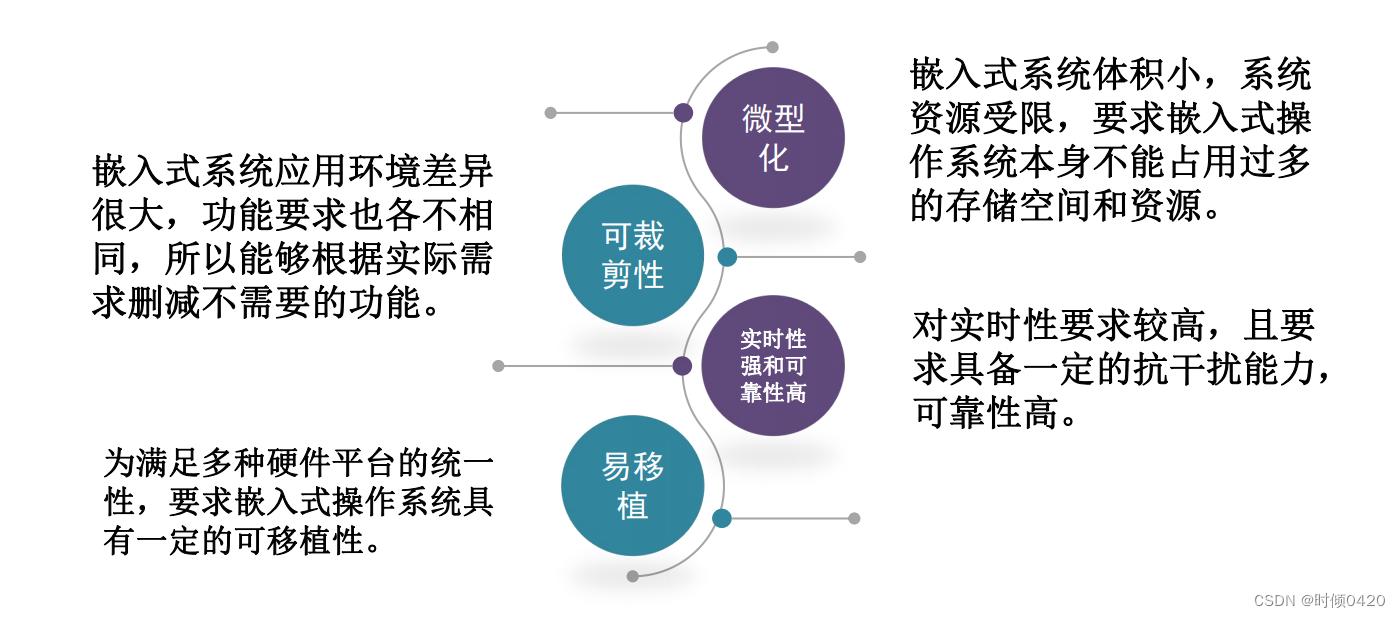
相比PC机操作系统,嵌入式操作系统具有以下的特点:
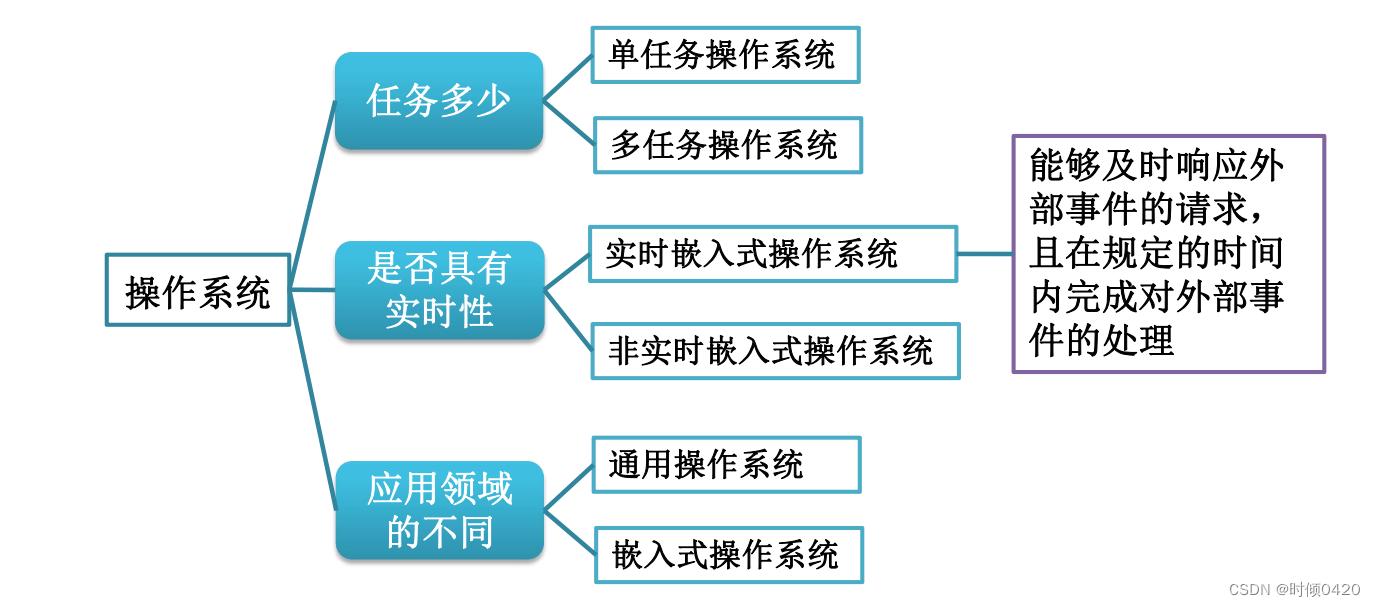
嵌入式系统的分类:
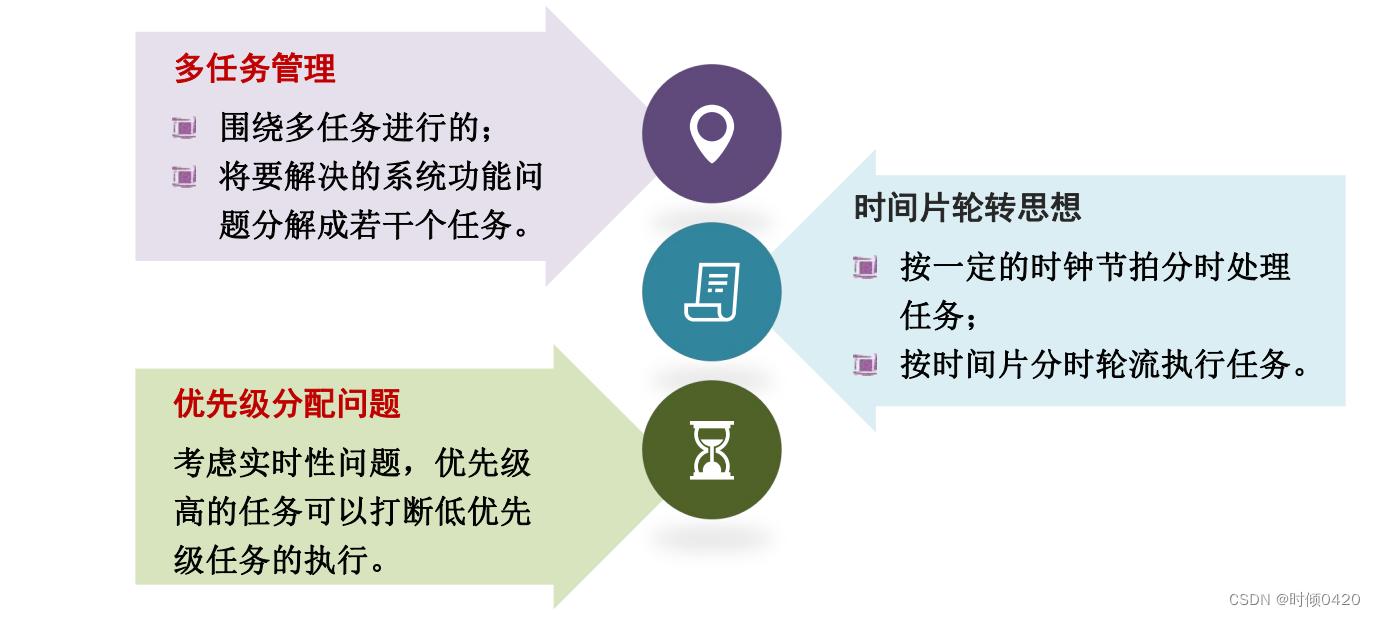
uC/OS-III就是一个基于优先级的抢占式多任务实时操作系统。
1.3uc/OS介绍
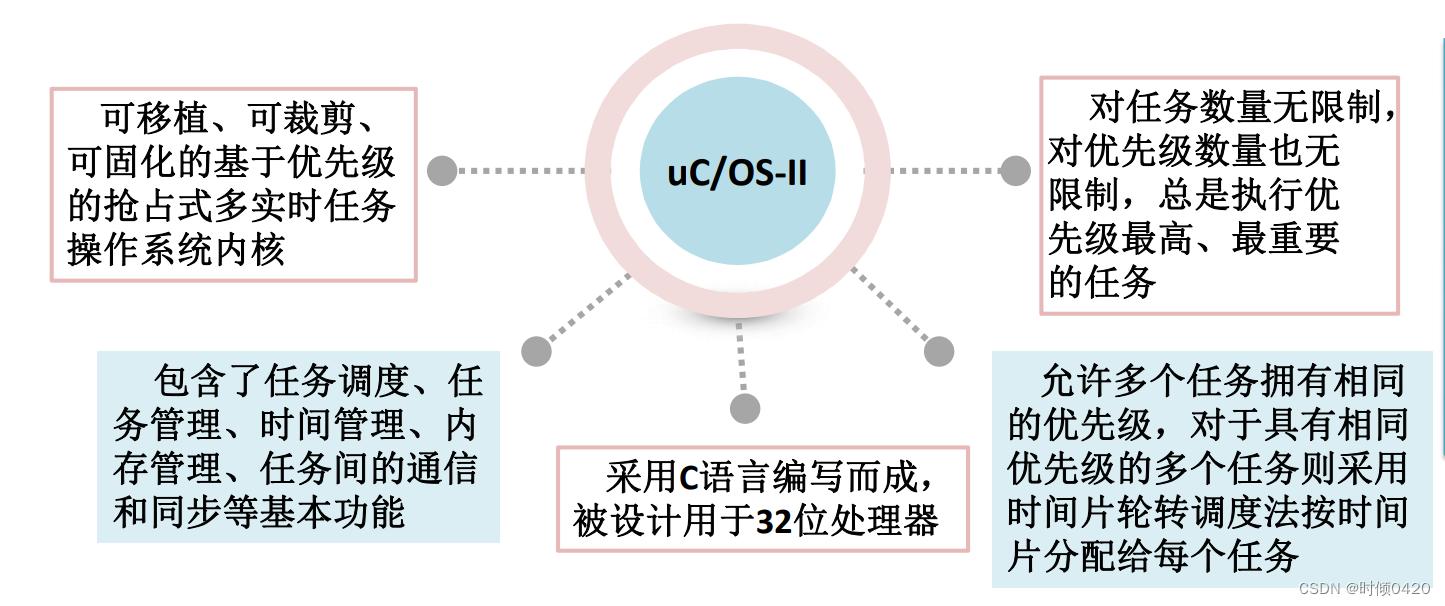
uc/OS是Micrium公司出品的RTOS类实时操作系统, uc/OS目前有两个版本:uc/OSII和uc/OSIII。
uc/OSIII是一个可裁剪、可剥夺型的多任务内核,而且没有任务数限制,提供了实时操作系统所需的所有功能,包括资源管理、同步、任务通信等。
uc/OSIII是用C和汇编来写的,其中绝大部分都是用C语言编写的,只有极少数的与处理器密切相关的部分代码才是用汇编写的, uc/OSIII结构简洁,可读性很强!非常适合初次接触嵌入式实时操作系统学生、嵌入式系统开发人员和爱好者学习。
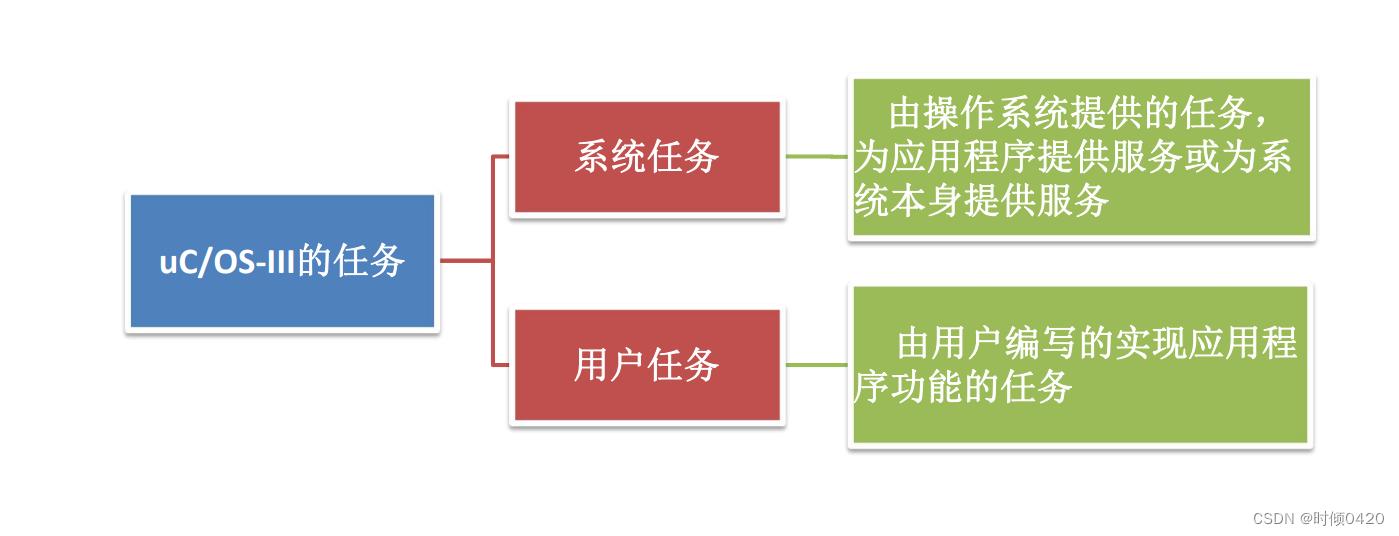
uC/OS-III的任务有两种:系统任务和用户任务
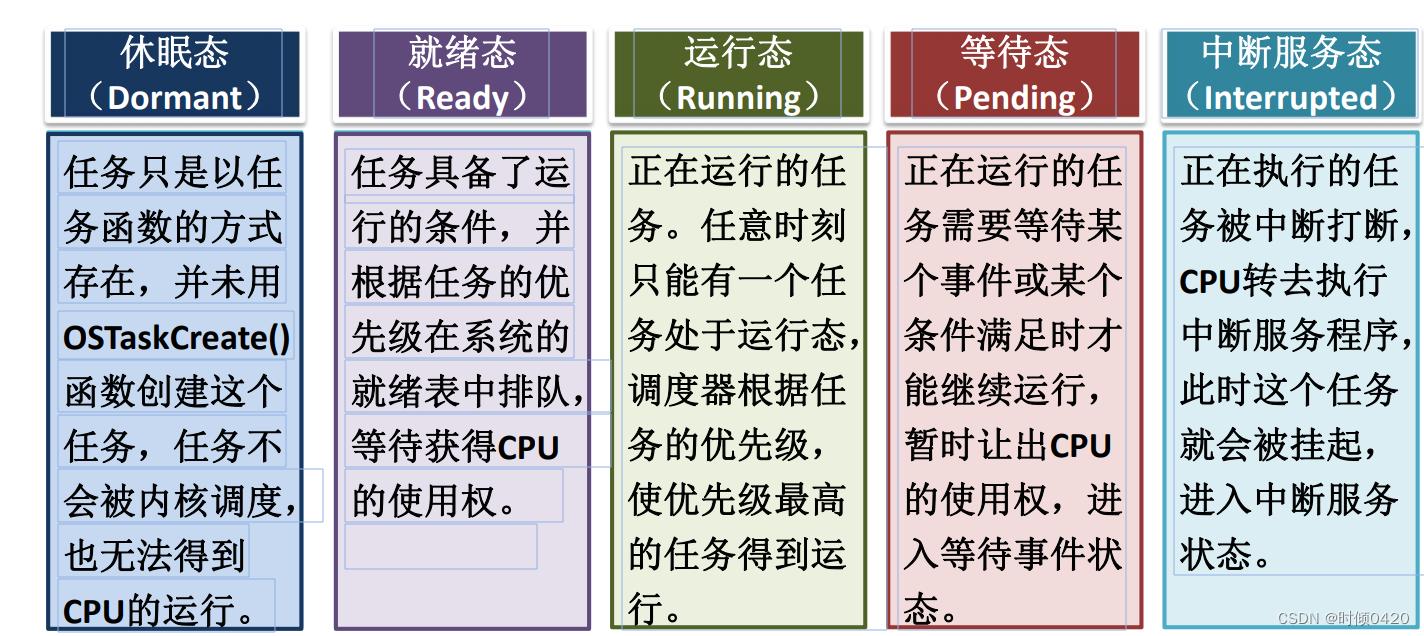
uC/OS-III任务的状态
uC/OS-III中每个任务都是一个无限循环,每个任务都有五种状态:
- 休眠态
- 就绪态
- 运行态
- 挂起态
- 中断服务态
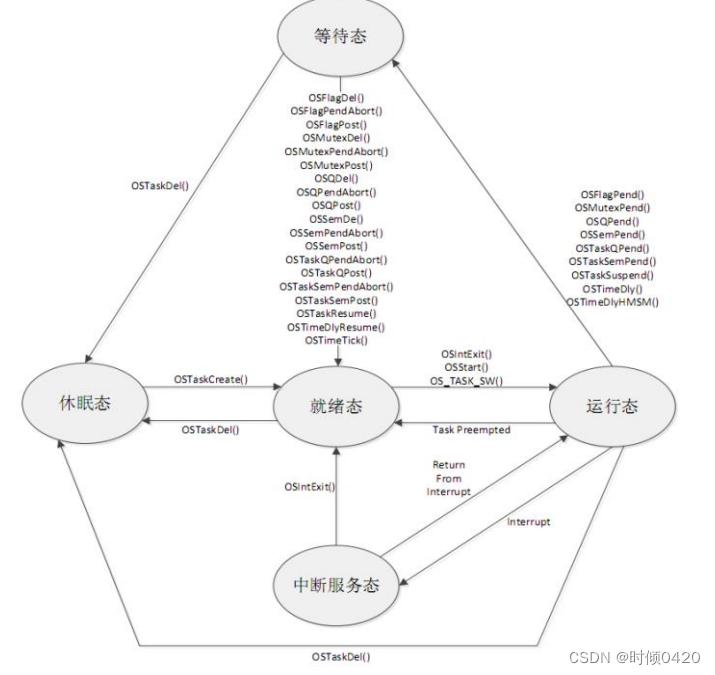
uC/OS-III任务的状态
任务就是程序实体,uC/OS-III通过管理和调度这些任务来实现应用程序功能。 任务可看作是一个简单的程序,每个任务被赋予一定的优先级,有对应的CPU寄存器和堆栈空间,以保证任务运行所需的系统资源。
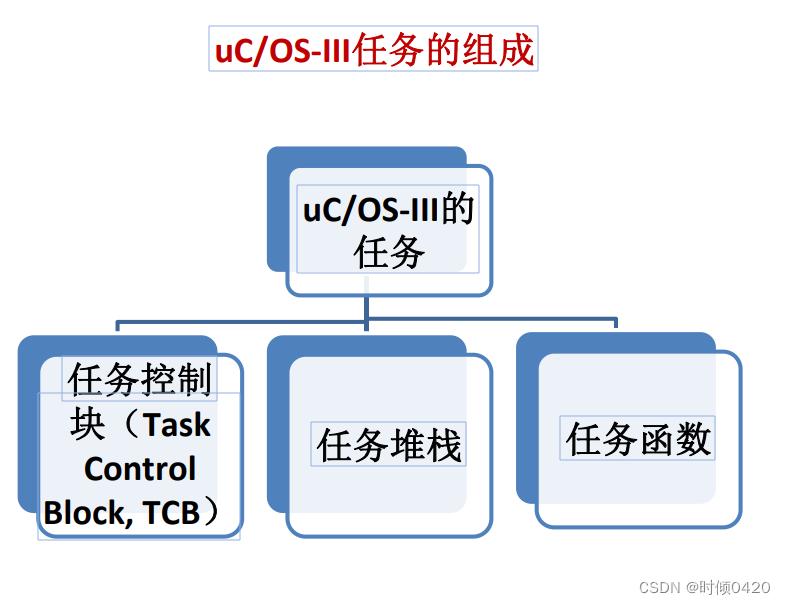
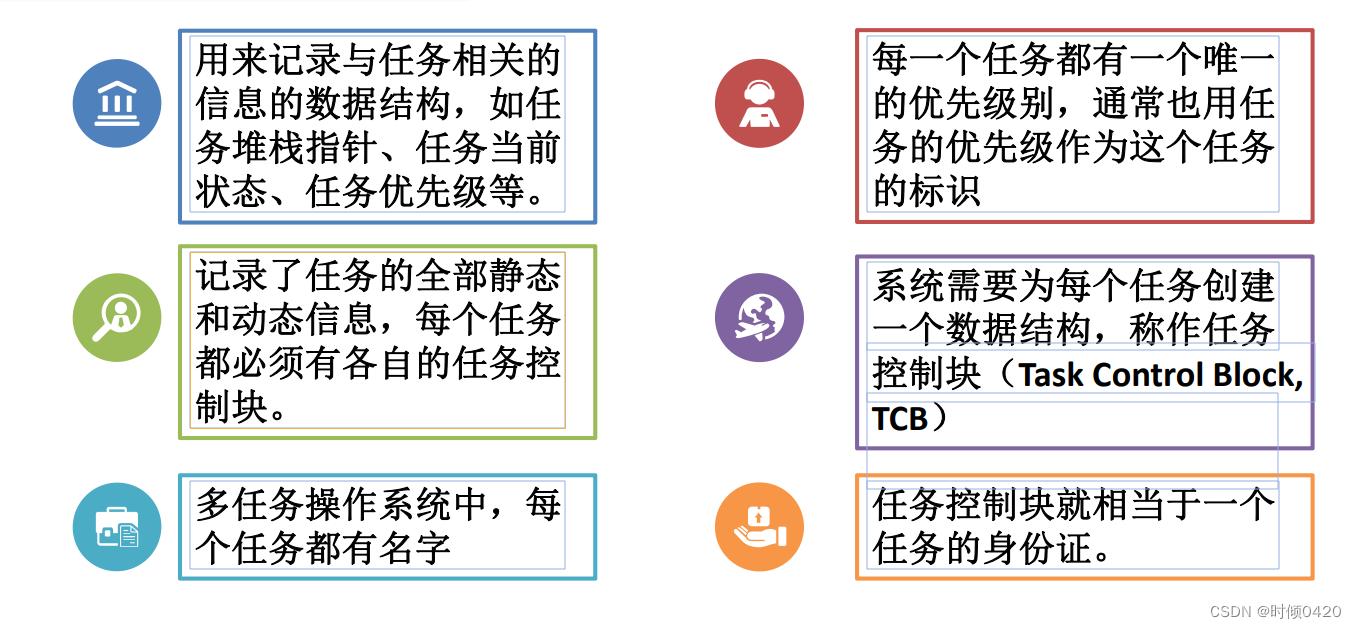
任务控制块
二、基于HAL库STM32F103C8T6移植uCOS
2.1建立CubeMX工程
1.新建工程,进行基本配置。
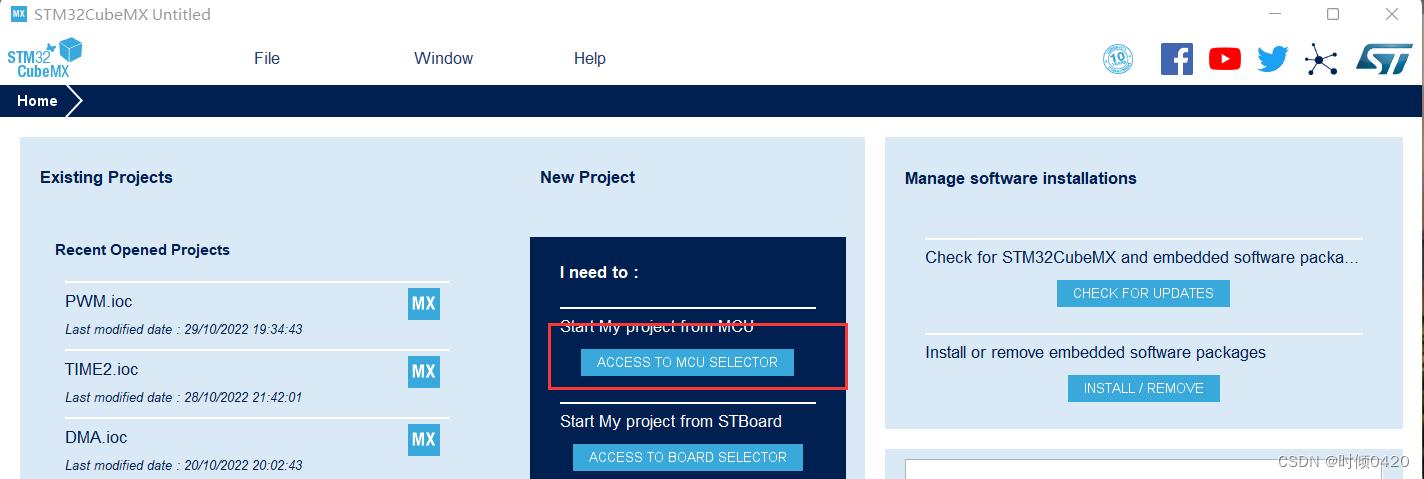
2.选择芯片“STM32F103C8”
3.RCC配置

4.SYS配置

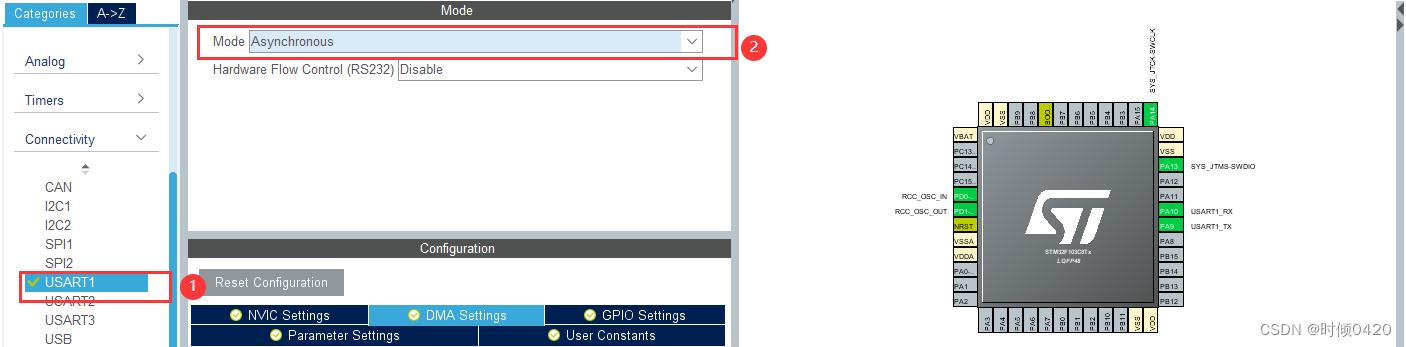
5.串口配置
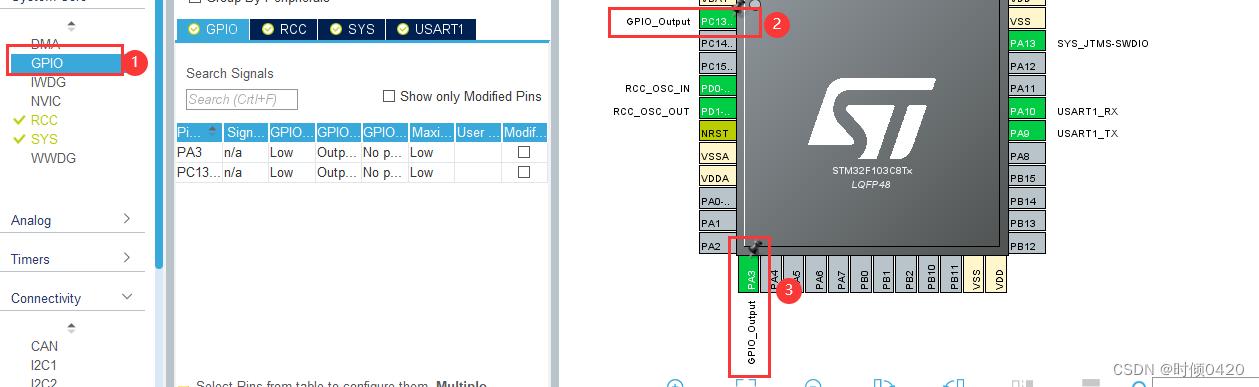
6.GPIO设置
设置PA3和PC13作为两个LED灯的输出
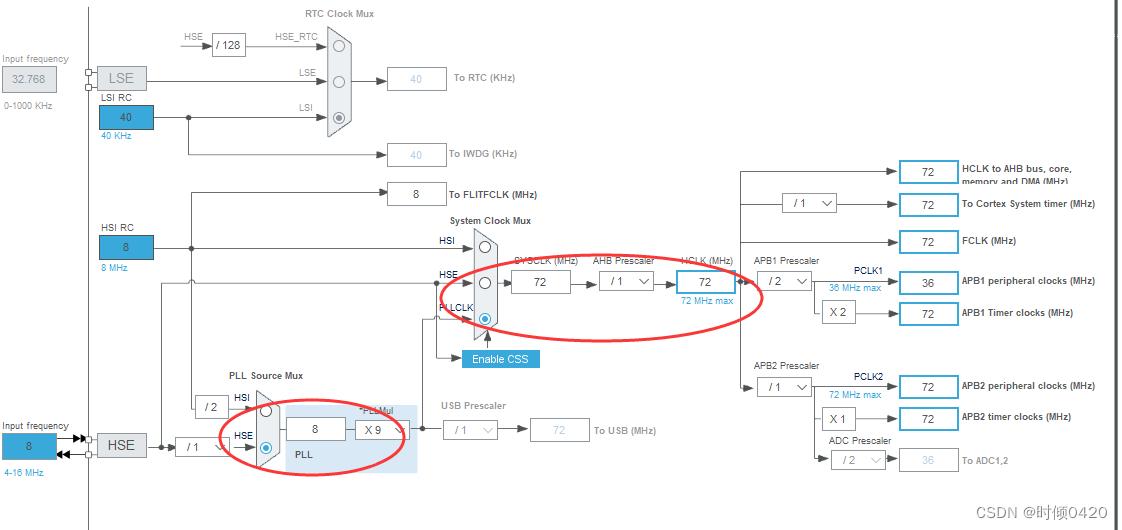
7.时钟设置
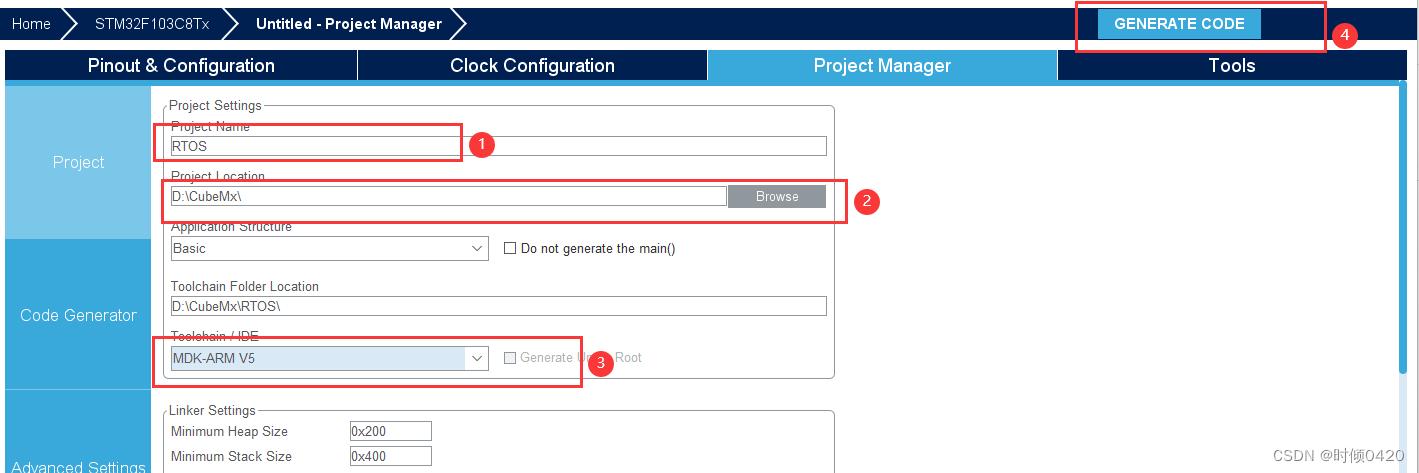
8.设置工程并打开
2.2获取uCOS-III源码
1.你可以选择去Micrium公司官网下载:
http://micrium.com/downloadcenter/
2.可以选择从我的百度网盘中下载:
链接:https://pan.baidu.com/s/1xn31xsc5pj89CxpEhoV4-g
提取码:1994
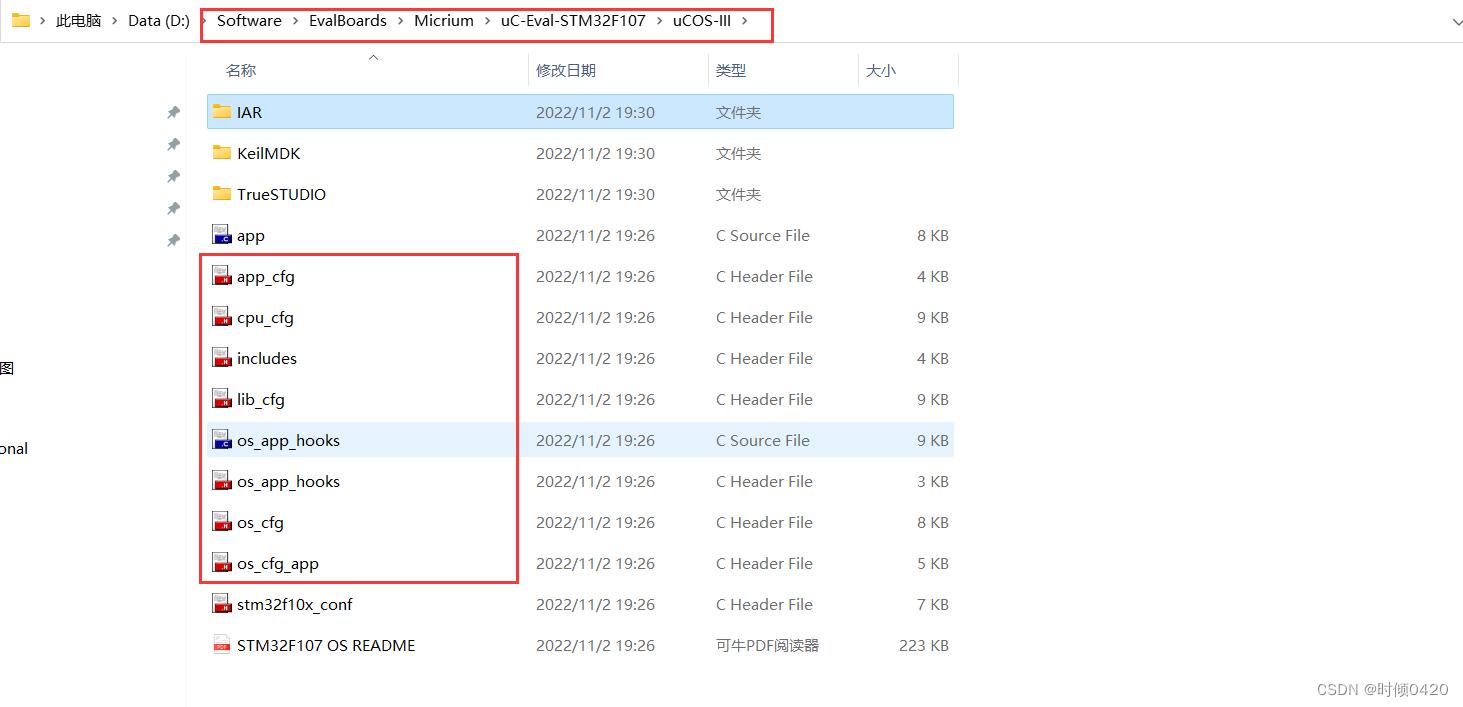
下载后之后打开文件:

2.3移植前的文件准备
1.为uC-BSP文件夹新建bsp.c和bsp.h文件
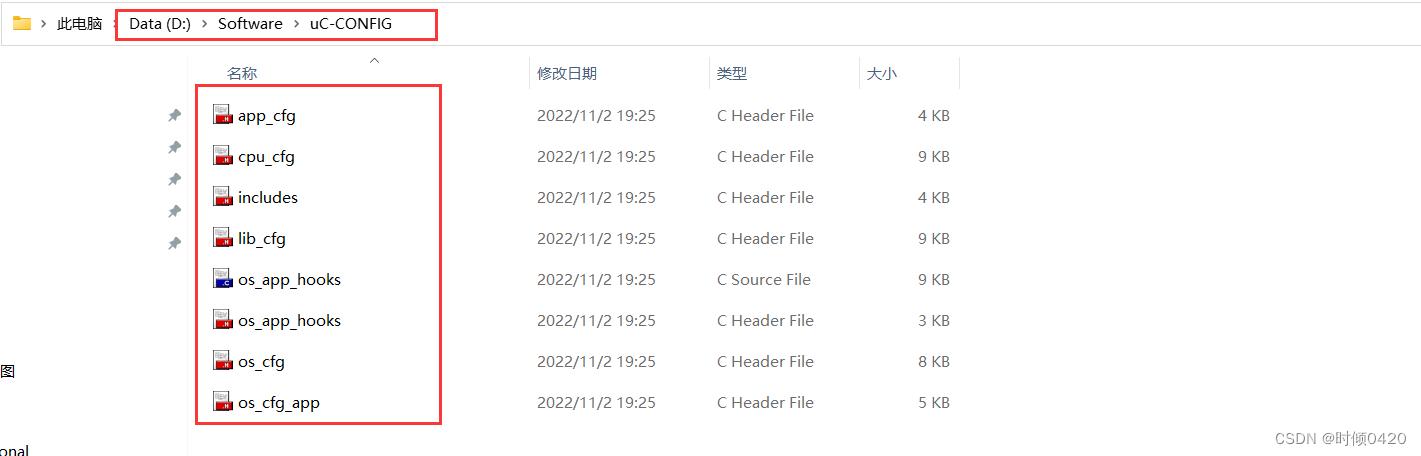
2.给文件夹uC-CONFIG添加以下文件(从以下路径复制过来)
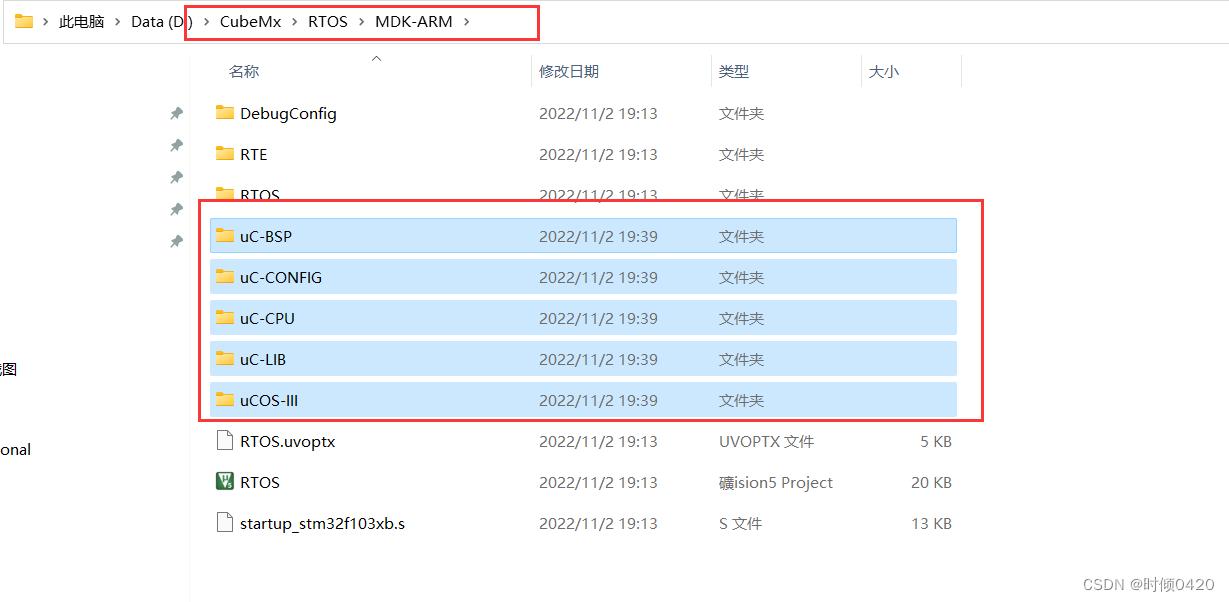
3.将uCOS相关文件复制到HAL工程的MDK-ARM文件夹下

2.4移植过程
回到Keil打开工程
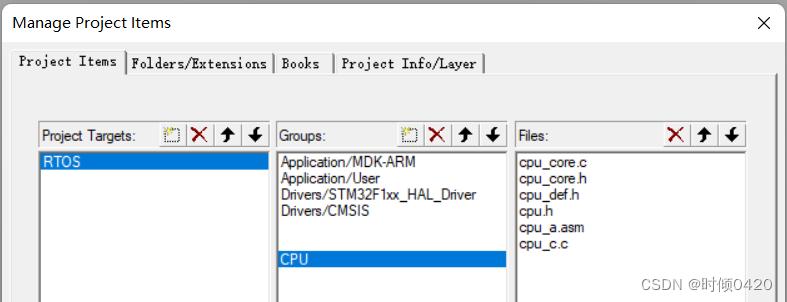
为新建项目添加文件:
添加的文件是(uc-?文件中的全部类型代码和RealView)
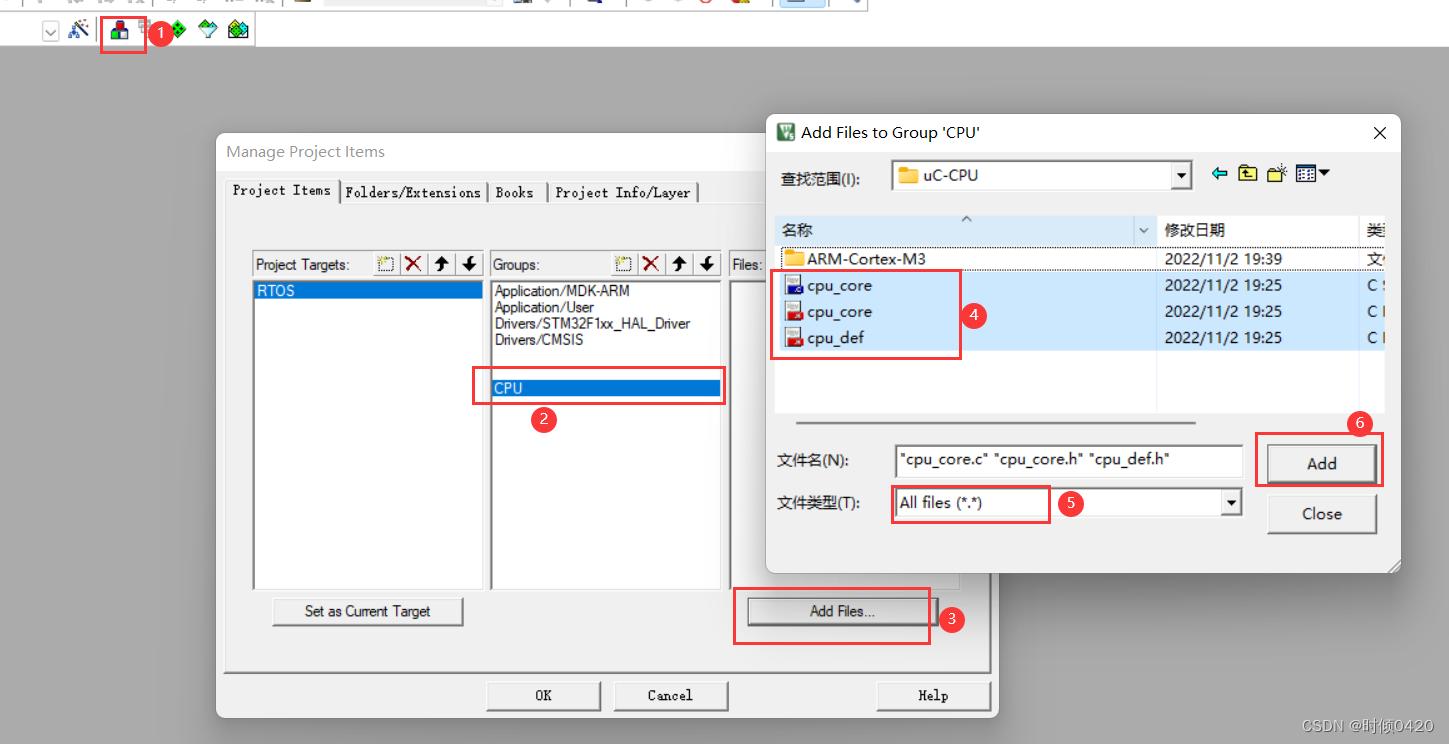
1.添加CPU文件:
点击CPU–>Add Files…,选中以下文件,Add
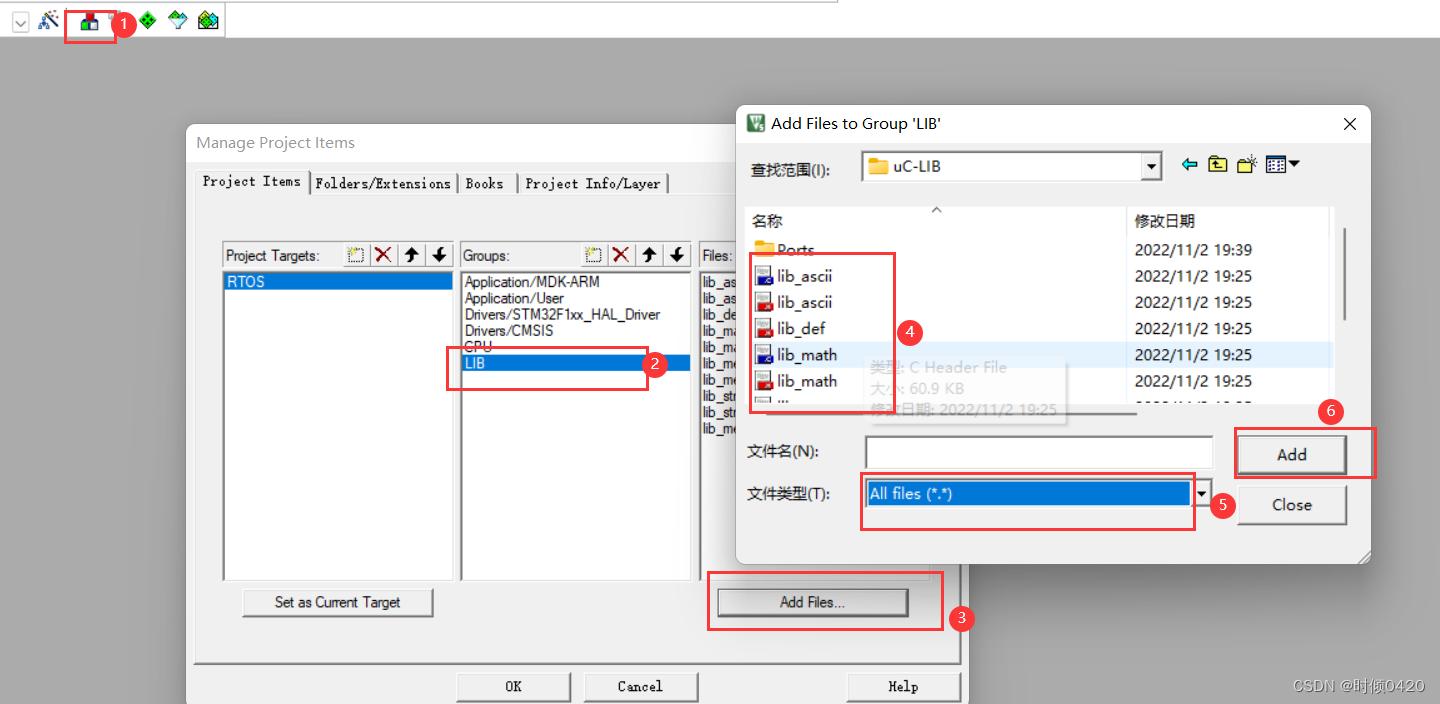
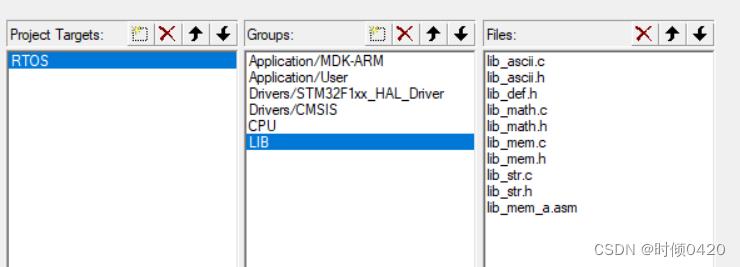
2.LIB文件添加
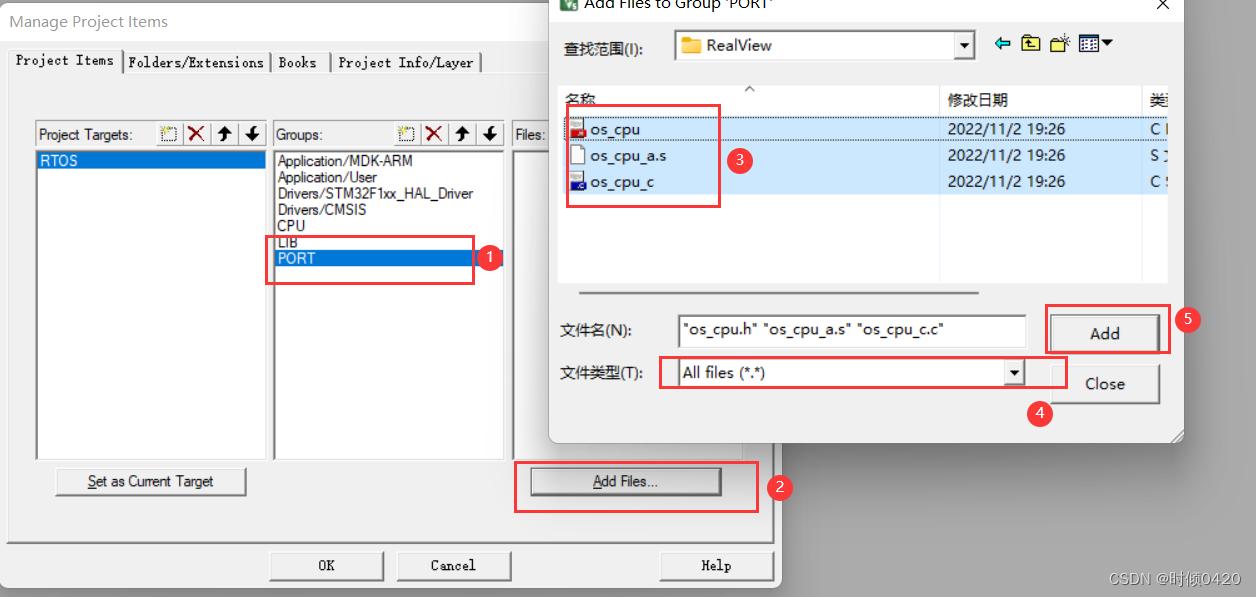
3.PORT文件添加
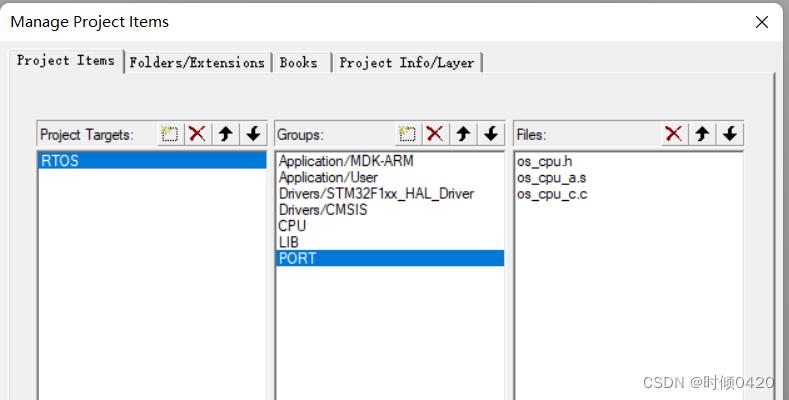
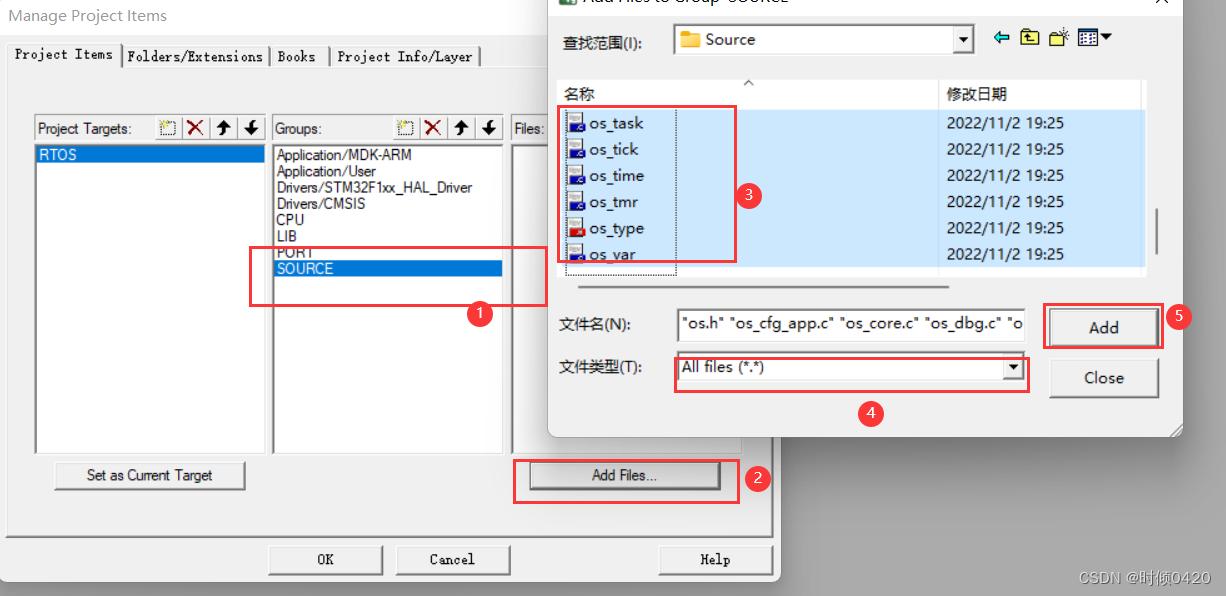
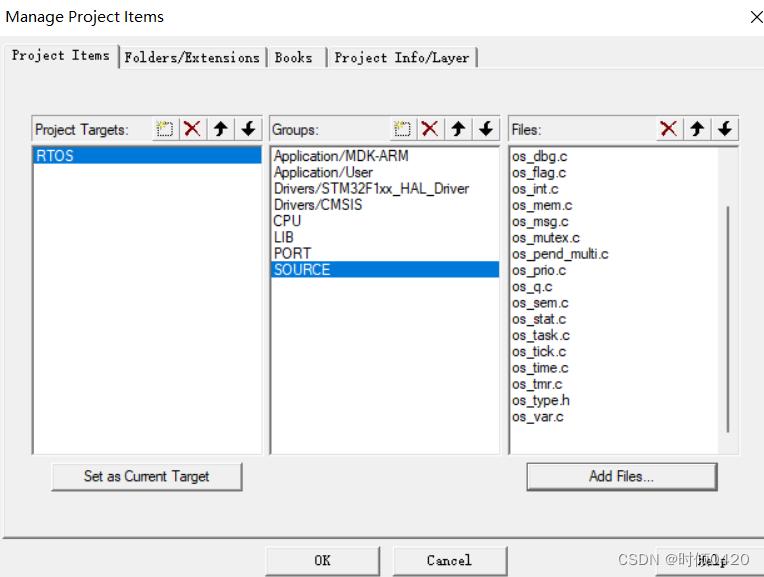
4.SOURCE文件添加
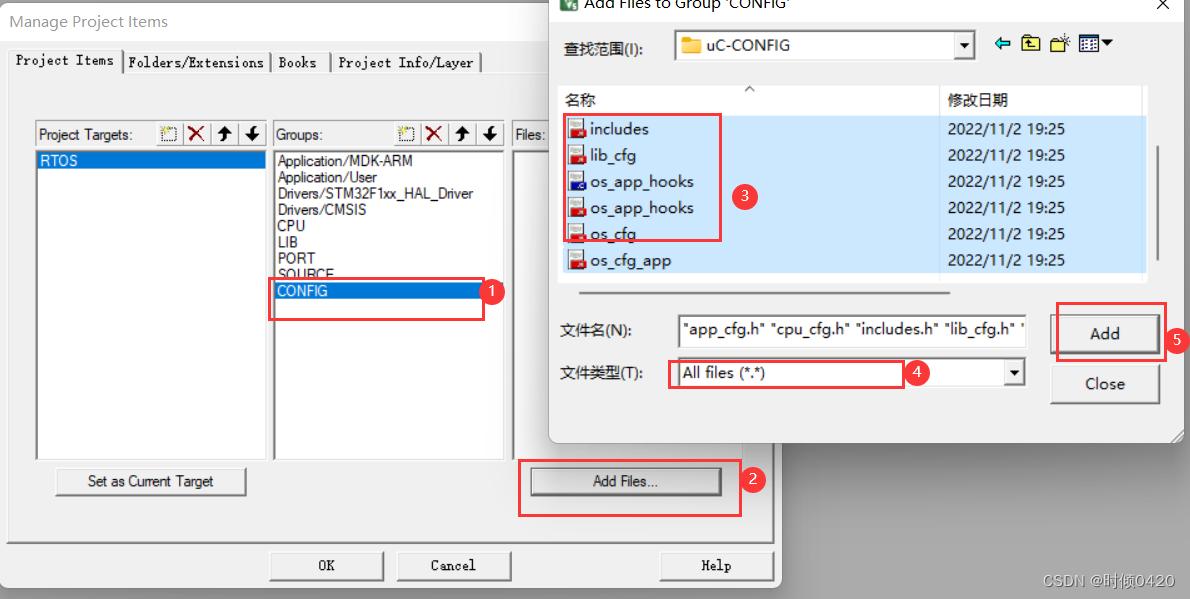
5.CONFIG文件添加
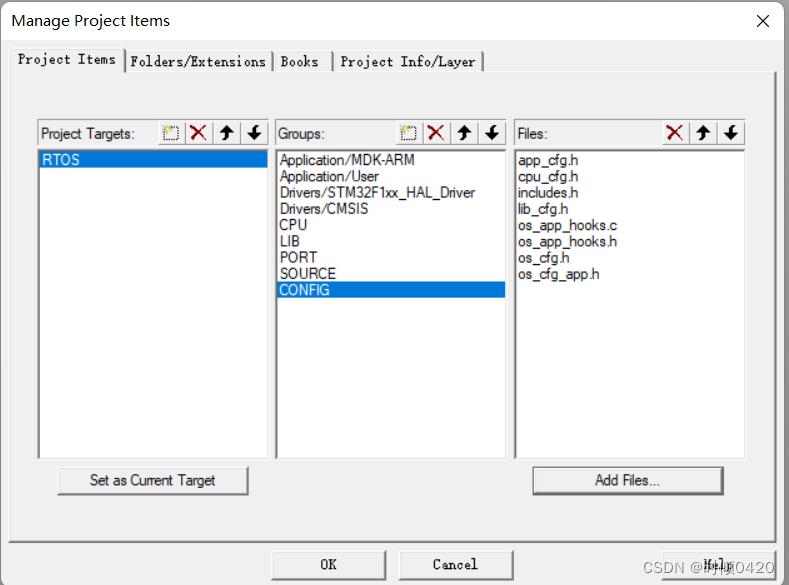
6.BSP文件添加
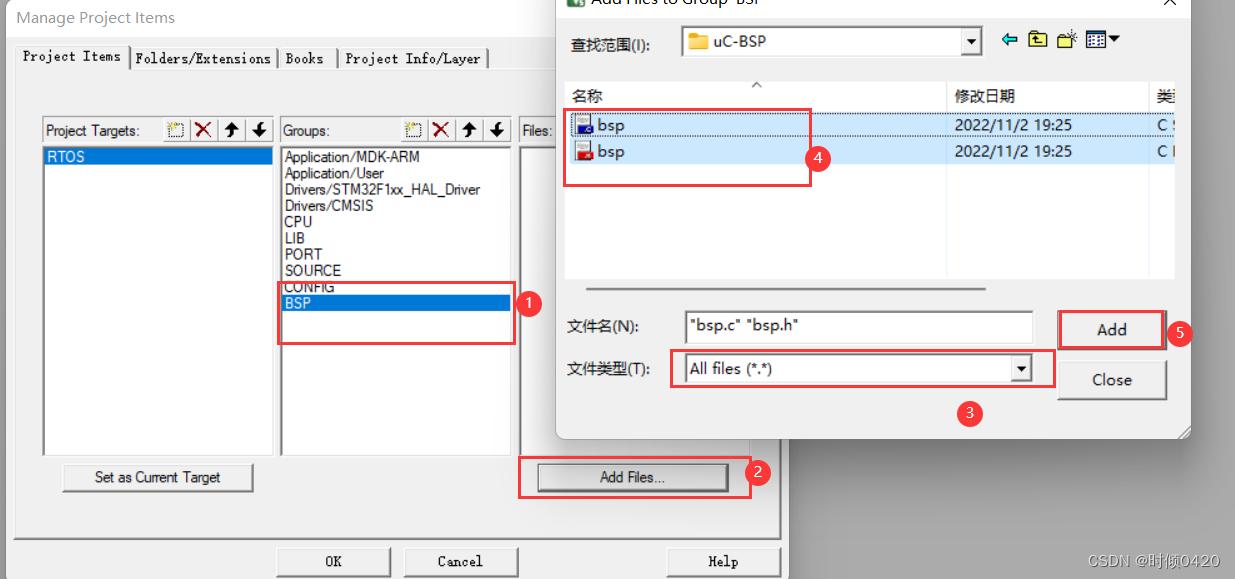
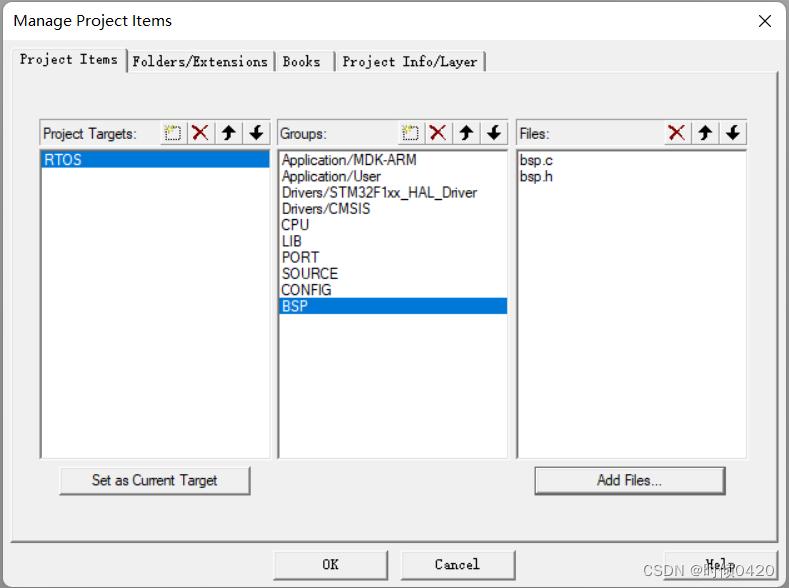
注意!!!
1.选择添加类型时一定要选择ALL FILES避免漏掉
2.在最后一定要点击ok不然前面都是无用功
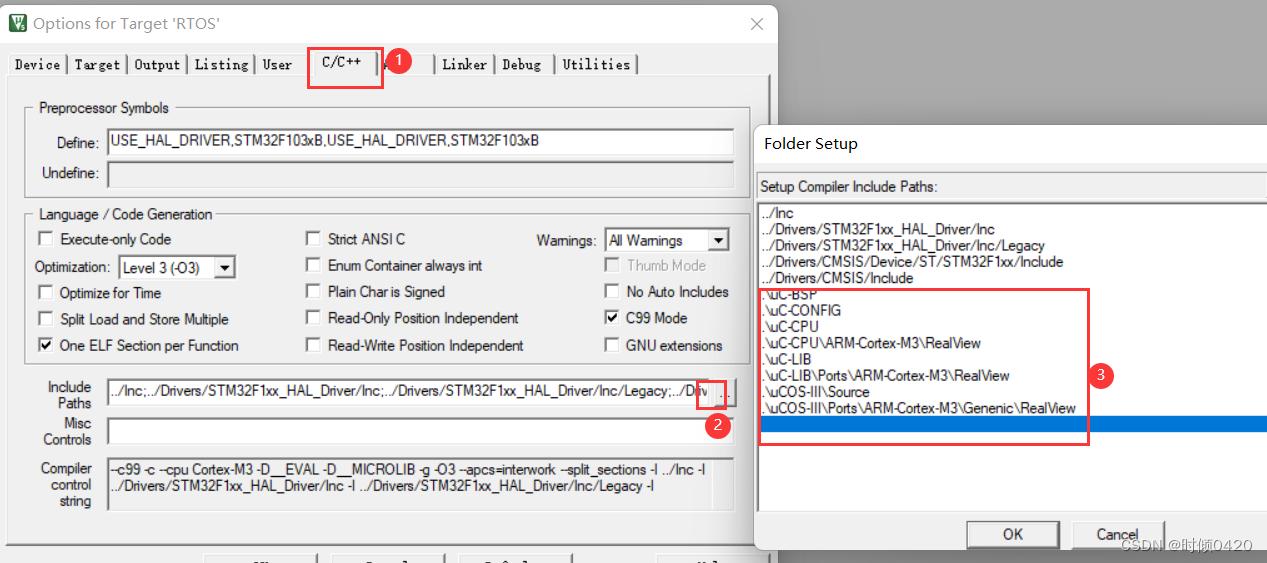
导入文件路径:
2.5构建三个任务
2.5.1代码添加
1.为bsp.c和bsp.h添加代码
bsp.c:
// bsp.c
#include "includes.h"
#define DWT_CR *(CPU_REG32 *)0xE0001000
#define DWT_CYCCNT *(CPU_REG32 *)0xE0001004
#define DEM_CR *(CPU_REG32 *)0xE000EDFC
#define DBGMCU_CR *(CPU_REG32 *)0xE0042004
#define DEM_CR_TRCENA (1 << 24)
#define DWT_CR_CYCCNTENA (1 << 0)
CPU_INT32U BSP_CPU_ClkFreq (void)
{
return HAL_RCC_GetHCLKFreq();
}
void BSP_Tick_Init(void)
{
CPU_INT32U cpu_clk_freq;
CPU_INT32U cnts;
cpu_clk_freq = BSP_CPU_ClkFreq();
#if(OS_VERSION>=3000u)
cnts = cpu_clk_freq/(CPU_INT32U)OSCfg_TickRate_Hz;
#else
cnts = cpu_clk_freq/(CPU_INT32U)OS_TICKS_PER_SEC;
#endif
OS_CPU_SysTickInit(cnts);
}
void BSP_Init(void)
{
BSP_Tick_Init();
MX_GPIO_Init();
}
#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
void CPU_TS_TmrInit (void)
{
CPU_INT32U cpu_clk_freq_hz;
DEM_CR |= (CPU_INT32U)DEM_CR_TRCENA; /* Enable Cortex-M3's DWT CYCCNT reg. */
DWT_CYCCNT = (CPU_INT32U)0u;
DWT_CR |= (CPU_INT32U)DWT_CR_CYCCNTENA;
cpu_clk_freq_hz = BSP_CPU_ClkFreq();
CPU_TS_TmrFreqSet(cpu_clk_freq_hz);
}
#endif
#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
CPU_TS_TMR CPU_TS_TmrRd (void)
{
return ((CPU_TS_TMR)DWT_CYCCNT);
}
#endif
#if (CPU_CFG_TS_32_EN == DEF_ENABLED)
CPU_INT64U CPU_TS32_to_uSec (CPU_TS32 ts_cnts)
{
CPU_INT64U ts_us;
CPU_INT64U fclk_freq;
fclk_freq = BSP_CPU_ClkFreq();
ts_us = ts_cnts / (fclk_freq / DEF_TIME_NBR_uS_PER_SEC);
return (ts_us);
}
#endif
#if (CPU_CFG_TS_64_EN == DEF_ENABLED)
CPU_INT64U CPU_TS64_to_uSec (CPU_TS64 ts_cnts)
{
CPU_INT64U ts_us;
CPU_INT64U fclk_freq;
fclk_freq = BSP_CPU_ClkFreq();
ts_us = ts_cnts / (fclk_freq / DEF_TIME_NBR_uS_PER_SEC);
return (ts_us);
}
#endif
bsp.h
#ifndef __BSP_H__
#define __BSP_H__
#include "stm32f1xx_hal.h"
void BSP_Init(void);
#endif

2.修改部分文件相关代码
main.c代码
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
#include "usart.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <includes.h>
#include "stm32f1xx_hal.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* 任务优先级 */
#define START_TASK_PRIO 3
#define LED0_TASK_PRIO 4
#define MSG_TASK_PRIO 5
/* 任务堆栈大小 */
#define START_STK_SIZE 64
#define LED0_STK_SIZE 64
#define MSG_STK_SIZE 64//任务堆大小过大会报错,可以试着改小一点
/* 任务栈 */
CPU_STK START_TASK_STK[START_STK_SIZE];
CPU_STK LED0_TASK_STK[LED0_STK_SIZE];
CPU_STK MSG_TASK_STK[MSG_STK_SIZE];
/* 任务控制块 */
OS_TCB StartTaskTCB;
OS_TCB Led0TaskTCB;
OS_TCB MsgTaskTCB;
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* 任务函数定义 */
void start_task(void *p_arg);
static void AppTaskCreate(void);
static void AppObjCreate(void);
static void led_pc13(void *p_arg);
static void send_msg(void *p_arg);
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
OS_ERR err;
OSInit(&err);
HAL_Init();
SystemClock_Config();
//MX_GPIO_Init(); 这个在BSP的初始化里也会初始化
MX_USART1_UART_Init();
/* 创建任务 */
OSTaskCreate((OS_TCB *)&StartTaskTCB, /* Create the start task */
(CPU_CHAR *)"start task",
(OS_TASK_PTR ) start_task,
(void *) 0,
(OS_PRIO ) START_TASK_PRIO,
(CPU_STK *)&START_TASK_STK[0],
(CPU_STK_SIZE) START_STK_SIZE/10,
(CPU_STK_SIZE) START_STK_SIZE,
(OS_MSG_QTY ) 0,
(OS_TICK ) 0,
(void *) 0,
(OS_OPT )(OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),
(OS_ERR *)&err);
/* 启动多任务系统,控制权交给uC/OS-III */
OSStart(&err); /* Start multitasking (i.e. give control to uC/OS-III). */
}
void start_task(void *p_arg)
{
OS_ERR err;
CPU_SR_ALLOC();
p_arg = p_arg;
/* YangJie add 2021.05.20*/
BSP_Init(); /* Initialize BSP functions */
//CPU_Init();
//Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); //统计任务
#endif
#ifdef CPU_CFG_INT_DIS_MEAS_EN //如果使能了测量中断关闭时间
CPU_IntDisMeasMaxCurReset();
#endif
#if OS_CFG_SCHED_ROUND_ROBIN_EN //当使用时间片轮转的时候
//使能时间片轮转调度功能,时间片长度为1个系统时钟节拍,既1*5=5ms
OSSchedRoundRobinCfg(DEF_ENABLED,1,&err);
#endif
OS_CRITICAL_ENTER(); //进入临界区
/* 创建LED0任务 */
OSTaskCreate((OS_TCB * )&Led0TaskTCB,
(CPU_CHAR * )"led_pc13",
(OS_TASK_PTR )led_pc13,
(void * )0,
(OS_PRIO )LED0_TASK_PRIO,
(CPU_STK * )&LED0_TASK_STK[0],
(CPU_STK_SIZE)LED0_STK_SIZE/10,
(CPU_STK_SIZE)LED0_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
/* 创建LED1任务 */
OSTaskCreate((OS_TCB * )&MsgTaskTCB,
(CPU_CHAR * )"send_msg",
(OS_TASK_PTR )send_msg,
(void * )0,
(OS_PRIO )MSG_TASK_PRIO,
(CPU_STK * )&MSG_TASK_STK[0],
(CPU_STK_SIZE)MSG_STK_SIZE/10,
(CPU_STK_SIZE)MSG_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
OS_TaskSuspend((OS_TCB*)&StartTaskTCB,&err); //挂起开始任务
OS_CRITICAL_EXIT(); //进入临界区
}
/**
* 函数功能: 启动任务函数体。
* 输入参数: p_arg 是在创建该任务时传递的形参
* 返 回 值: 无
* 说 明:无
*/
static void led_pc13 (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_RESET);
OSTimeDlyHMSM(0, 0, 0, 500,OS_OPT_TIME_HMSM_STRICT,&err);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_SET);
OSTimeDlyHMSM(0, 0, 0, 500,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
static void send_msg (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
printf("hello world \r\n");
OSTimeDlyHMSM(0, 0, 0, 500,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/* USER CODE BEGIN 4 */
/**
* 函数功能: 创建应用任务
* 输入参数: p_arg 是在创建该任务时传递的形参
* 返 回 值: 无
* 说 明:无
*/
static void AppTaskCreate (void)
{
}
/**
* 函数功能: uCOSIII内核对象创建
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
static void AppObjCreate (void)
{
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
打开startup_stm32f103xb.s文件
在以下位置处将PendSV_Handler改为OS_CPU_PendSVHandler,
SysTick_Handler改为OS_CPU_SysTickHandler


打开app_cfg.h文件
DEF_ENABLED 改为 DEF_DISABLED

#define APP_TRACE BSP_Ser_Printf 改为 #define APP_TRACE(void)

打开includes.h文件
在#include<bsp.h>处添加

另外将<stm32f103x_lib.h>改为<stm32f1xx_hal.h>

打开lib_cfg.h文件
修改为5(该处宏定义设置堆空间的大小,STM32F103C8Tx的RAM只有20K,所以要改小一点)

打开usart.c文件,添加代码完成printf重定向
/* USER CODE BEGIN 1 */
int fputc(int ch,FILE *f){
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,0xffff);
return ch;
}
/* USER CODE END 1 */

2.5.2参数配置

2.5.3初始化管脚
在gpio.c文件中修改代码
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_RESET);
/*Configure GPIO pin : PC13|PA3 */
GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
2.5.4撰写主函数
修改main.c文件
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* 任务优先级 */
#define START_TASK_PRIO 3
#define LED0_TASK_PRIO 4
#define MSG_TASK_PRIO 5
#define LED1_TASK_PRIO 6
/* 任务堆栈大小 */
#define START_STK_SIZE 96
#define LED0_STK_SIZE 64
#define MSG_STK_SIZE 64
#define LED1_STK_SIZE 64
/* 任务栈 */
CPU_STK START_TASK_STK[START_STK_SIZE];
CPU_STK LED0_TASK_STK[LED0_STK_SIZE];
CPU_STK MSG_TASK_STK[MSG_STK_SIZE];
CPU_STK LED1_TASK_STK[LED1_STK_SIZE];
/* 任务控制块 */
OS_TCB StartTaskTCB;
OS_TCB Led0TaskTCB;
OS_TCB MsgTaskTCB;
OS_TCB Led1TaskTCB;
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* 任务函数定义 */
void start_task(void *p_arg);
static void AppTaskCreate(void);
static void AppObjCreate(void);
static void led_pc13(void *p_arg);
static void send_msg(void *p_arg);
static void led_pa3(void *p_arg);
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
OS_ERR err;
OSInit(&err);
HAL_Init();
SystemClock_Config();
//MX_GPIO_Init(); 这个在BSP的初始化里也会初始化
MX_USART1_UART_Init();
/* 创建任务 */
OSTaskCreate((OS_TCB *)&StartTaskTCB, /* Create the start task */
(CPU_CHAR *)"start task",
(OS_TASK_PTR ) start_task,
(void *) 0,
(OS_PRIO ) START_TASK_PRIO,
(CPU_STK *)&START_TASK_STK[0],
(CPU_STK_SIZE) START_STK_SIZE/10,
(CPU_STK_SIZE) START_STK_SIZE,
(OS_MSG_QTY ) 0,
(OS_TICK ) 0,
(void *) 0,
(OS_OPT )(OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),
(OS_ERR *)&err);
/* 启动多任务系统,控制权交给uC/OS-III */
OSStart(&err); /* Start multitasking (i.e. give control to uC/OS-III). */
}
void start_task(void *p_arg)
{
OS_ERR err;
CPU_SR_ALLOC();
p_arg = p_arg;
/* YangJie add 2021.05.20*/
BSP_Init(); /* Initialize BSP functions */
//CPU_Init();
//Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); //统计任务
#endif
#ifdef CPU_CFG_INT_DIS_MEAS_EN //如果使能了测量中断关闭时间
CPU_IntDisMeasMaxCurReset();
#endif
#if OS_CFG_SCHED_ROUND_ROBIN_EN //当使用时间片轮转的时候
//使能时间片轮转调度功能,时间片长度为1个系统时钟节拍,既1*5=5ms
OSSchedRoundRobinCfg(DEF_ENABLED,1,&err);
#endif
OS_CRITICAL_ENTER(); //进入临界区
/* 创建LED0任务 */
OSTaskCreate((OS_TCB * )&Led0TaskTCB,
(CPU_CHAR * )"led_pc13",
(OS_TASK_PTR )led_pc13,
(void * )0,
(OS_PRIO )LED0_TASK_PRIO,
(CPU_STK * )&LED0_TASK_STK[0],
(CPU_STK_SIZE)LED0_STK_SIZE/10,
(CPU_STK_SIZE)LED0_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
/* 创建LED1任务 */
OSTaskCreate((OS_TCB * )&Led1TaskTCB,
(CPU_CHAR * )"led_pa3",
(OS_TASK_PTR )led_pa3,
(void * )0,
(OS_PRIO )LED1_TASK_PRIO,
(CPU_STK * )&LED1_TASK_STK[0],
(CPU_STK_SIZE)LED1_STK_SIZE/10,
(CPU_STK_SIZE)LED1_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
/* 创建MSG任务 */
OSTaskCreate((OS_TCB * )&MsgTaskTCB,
(CPU_CHAR * )"send_msg",
(OS_TASK_PTR )send_msg,
(void * )0,
(OS_PRIO )MSG_TASK_PRIO,
(CPU_STK * )&MSG_TASK_STK[0],
(CPU_STK_SIZE)MSG_STK_SIZE/10,
(CPU_STK_SIZE)MSG_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
OS_TaskSuspend((OS_TCB*)&StartTaskTCB,&err); //挂起开始任务
OS_CRITICAL_EXIT(); //进入临界区
}
/**
* 函数功能: 启动任务函数体。
* 输入参数: p_arg 是在创建该任务时传递的形参
* 返 回 值: 无
* 说 明:无
*/
static void led_pc13 (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_RESET);
OSTimeDlyHMSM(0, 0, 1, 0,OS_OPT_TIME_HMSM_STRICT,&err);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_SET);
OSTimeDlyHMSM(0, 0, 1, 0,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
static void led_pa3 (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_RESET);
OSTimeDlyHMSM(0, 0, 3, 0,OS_OPT_TIME_HMSM_STRICT,&err);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_SET);
OSTimeDlyHMSM(0, 0, 3, 0,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
static void send_msg (void *p_arg)
{
OS_ERR err;
(void)p_arg;
BSP_Init(); /* Initialize BSP functions */
CPU_Init();
Mem_Init(); /* Initialize Memory Management Module */
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); /* Compute CPU capacity with no task running */
#endif
CPU_IntDisMeasMaxCurReset();
AppTaskCreate(); /* Create Application Tasks */
AppObjCreate(); /* Create Application Objects */
while (DEF_TRUE)
{
printf("hello uc/OS \r\n");
OSTimeDlyHMSM(0, 0, 2, 0,OS_OPT_TIME_HMSM_STRICT,&err);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/* USER CODE BEGIN 4 */
/**
* 函数功能: 创建应用任务
* 输入参数: p_arg 是在创建该任务时传递的形参
* 返 回 值: 无
* 说 明:无
*/
static void AppTaskCreate (void)
{
}
/**
* 函数功能: uCOSIII内核对象创建
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
static void AppObjCreate (void)
{
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
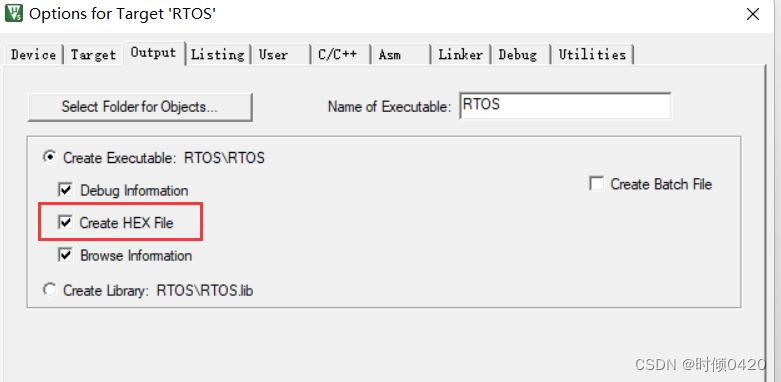
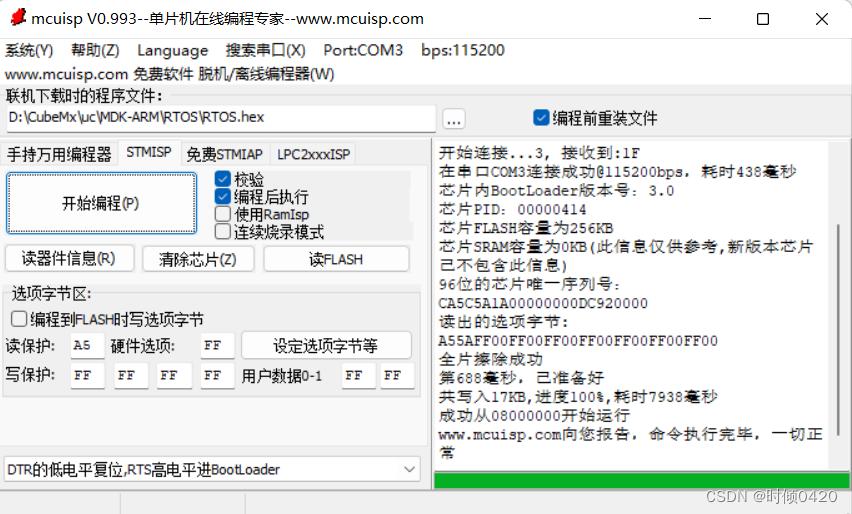
编译并烧录

三、运行结果
LED灯结果展示:
LED灯显示
串口显示:
串口显示
四、补充说明
如果要改变LED灯闪烁的周期和串口的周期可以从下面的函数中进行修改:



五、总结
这次的实验我们学习了嵌入式的实时操作系统,在一个工程文件里同时设置了三个任务。这次的实验相当于我们我们之前的实验来说是有一点复杂的,在参照学长学姐的博客时,按照步骤操作时一定要仔细,如果是这次实验有一点小的错误要检查出来是要花费一定的时间的,尤其是在Keil中添加文件和文件地址时一定要仔细检查,千万不要漏掉或者写错。
六、参考资料
1https://blog.csdn.net/qq_46467126/article/details/121441622
2.https://blog.csdn.net/qq_45659777/article/details/121570886
转自:
https://blog.csdn.net/qq_52171727/article/details/127656806